



















walking机器人仿真教程-设置行为树目标点
walking机器人仿真教程-设置行为树目标点
说明:
- 介绍如何设置行为树的目标点
相关设备:
- walking机器人套件:采购地址
步骤:
- 比如在行为树通常设置不同目标点
- 如图
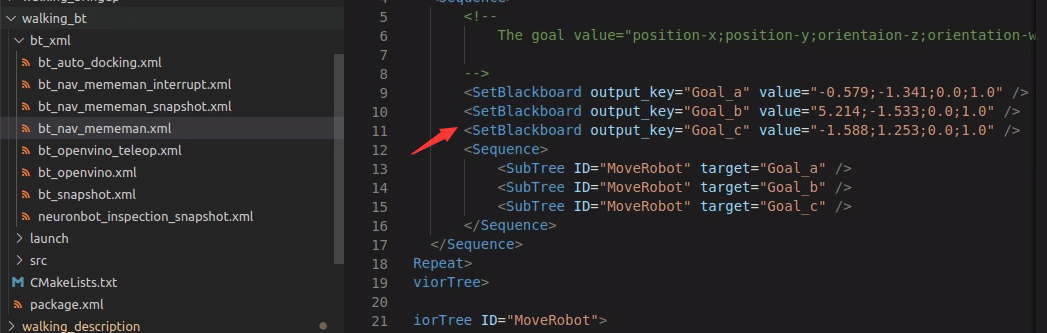
- 目标点都是四位数,分别取数据里面的positoin X, Y 和 orientation 里面的 Z, W
- 有如下几个方法获取:
通过PublishPoint来获取
通过订阅/goal_pose来获取
通过TF来获取这个位置
通过Odom数据来获取
- 打开单点导航的例子
通过PublishPoint来获取
在Rviz上点击PublishPoint, 在地图上悬停,则在状态栏出现位置的坐标点
效果图

- 看到这个的坐标点位[5.63, -0.157, 0.00638]
- 取前面的X=5.63, Y=-0.157,Z=0.0, W=1.0
- 记录不同的坐标点为目标点, 都指定Z=0.0, W=1.0,代表正向
通过订阅/goal_pose来获取
- 订阅/goal_pose话题
ros2 topic echo /goal_pose
- 选择RVIZ上的2D Goal pose ,再点击地图任意位置,订阅的终端就会显示坐标点
- 效果如下:
$ ros2 topic echo /goal_pose
header:
stamp:
sec: 3695
nanosec: 866000000
frame_id: map
pose:
position:
x: 1.4134427309036255
y: 0.3642732501029968
z: 0.0
orientation:
x: 0.0
y: 0.0
z: -0.03647434184577899
w: 0.9993345898080969
- 选择position的XY,orientation的ZW即可.
通过TF来获取这个位置
- 当小车到达任意一个位置点之后,可以打开TF->Frame->base_link, 查看Position的XY,Orientation的ZW即可.
- 效果图

通过Odom数据来获取
- 当小车到达任意一个位置点之后
- 订阅Odom话题
$ ros2 topic echo /odom
header:
stamp:
sec: 4283
nanosec: 230000000
frame_id: odom
child_frame_id: base_footprint
pose:
pose:
position:
x: 1.305952992156922
y: 0.17271353918841312
z: 0.1424994026383616
orientation:
x: -1.7126144155711424e-07
y: -1.1353597159865806e-06
z: 0.08775222186676093
w: 0.9961423329806481
- 选择position的XY,orientation的ZW即可
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号