



















walking机器人仿真教程-启动仿真环境
walking机器人仿真教程-启动仿真环境
说明:
- 介绍walking机器人如何启动仿真环境
相关设备:
- walking机器人套件:采购地址
步骤:
- 新终端,启动命令
- 目前收集了多个仿真环境,默认采用mememan_world,其他包括office.sdf,phenix_world.sdf,simple.sdf
- 默认启动如下
ros2 launch walking_gazebo world.launch.py
或
ros2 launch walking_gazebo world.launch.py world_model:=mememan_world.sdf
- 效果图:
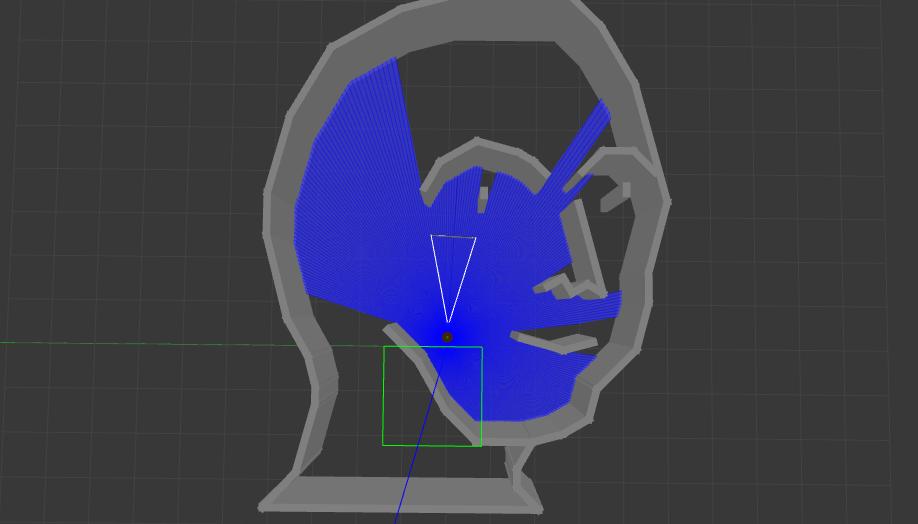
- 启动office.sdf
ros2 launch walking_gazebo world.launch.py world_model:=office.sdf
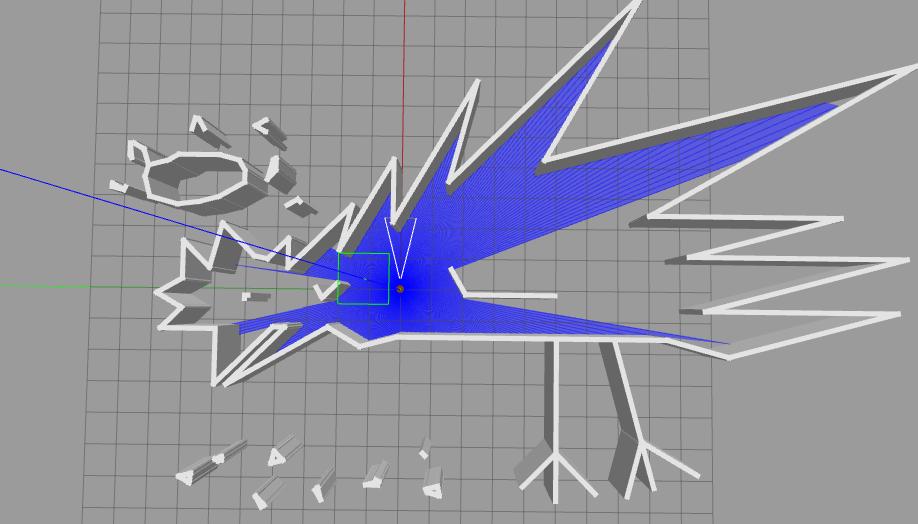
- 效果图:

- 启动phenix_world.sdf
ros2 launch walking_gazebo world.launch.py world_model:=phenix_world.sdf
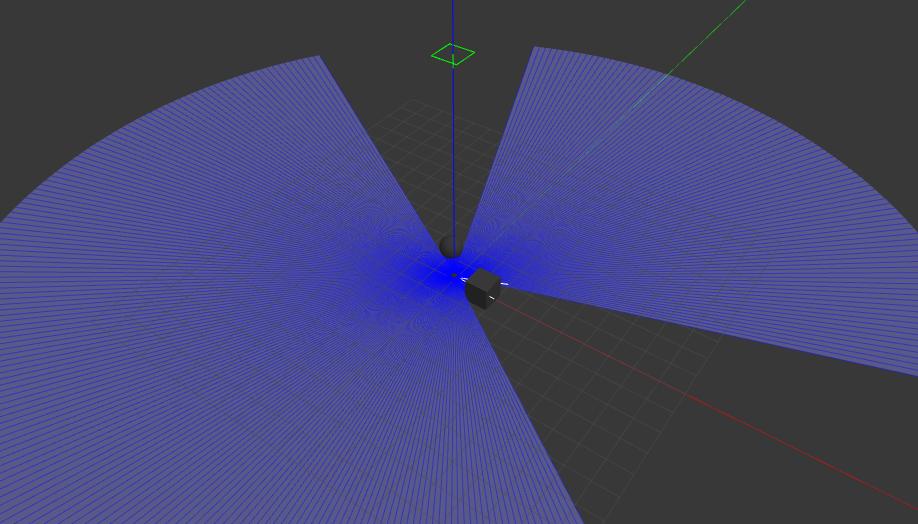
- 效果图:
- 启动phenix_world.sdf
ros2 launch walking_gazebo world.launch.py world_model:=simple.sdf
- 效果图:
演示视频
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号