



















Turtlebot3自动驾驶2020仿真教程-交通标志识别
Turtlebot3自动驾驶2020仿真教程-交通标志识别
说明:
本教程主要介绍TB3自动驾驶2020的仿真测试中交通标志识别的校准和测试流程
由于在该仿真环境是固定不变的,所以可以先使用程序默认配置好的交通标志图像进行测试,若效果不好再重新获取图像
校准
- 新终端,启动gazebo节点
$ roslaunch turtlebot3_gazebo turtlebot3_autorace_2020.launch
- 新终端,启动键盘控制节点,移动TB3到交通标志的车道前,让其能清楚地看到标志
$ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
- 新终端, 打开可视化界面,选择
/camera/image_compensated
$ rqt_image_view
这时的图像应该清晰地看到该标志,保存该图像同时从中裁剪出只带有交通标志的部分
然后将裁剪下载的标志图像放在
/turtlebot3_autorace_2020/turtlebot3_autorace_detect/image/目录中图像的名称应与源码中指定的名称相匹配,譬如
construction.png、intersection.png、left.png、right.png、parking.png、stop.pn和tunnel.png
测试
关闭前面打开的所有终端
新终端, 启动gazebo节点
$ roslaunch turtlebot3_gazebo turtlebot3_autorace_2020.launch
- 新终端,启动相机的内标定
$ roslaunch turtlebot3_autorace_camera intrinsic_camera_calibration.launch
- 新终端,启动相机的外标定
$ roslaunch turtlebot3_autorace_camera extrinsic_camera_calibration.launch
- 新终端,启动键盘控制节点,移动TB3到需要检测的交通标志的稍微往前一点点的车道前,让其能清楚地看到标志
$ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
TB3移动到位置后,关闭键盘控制节点新终端,启动交通检测程序,并选择需要检测的信号标志的任务参数,对应的参数有:
intersection、construction、parking、level_crossing和tunnel
$ roslaunch turtlebot3_autorace_detect detect_sign.launch mission:=intersection
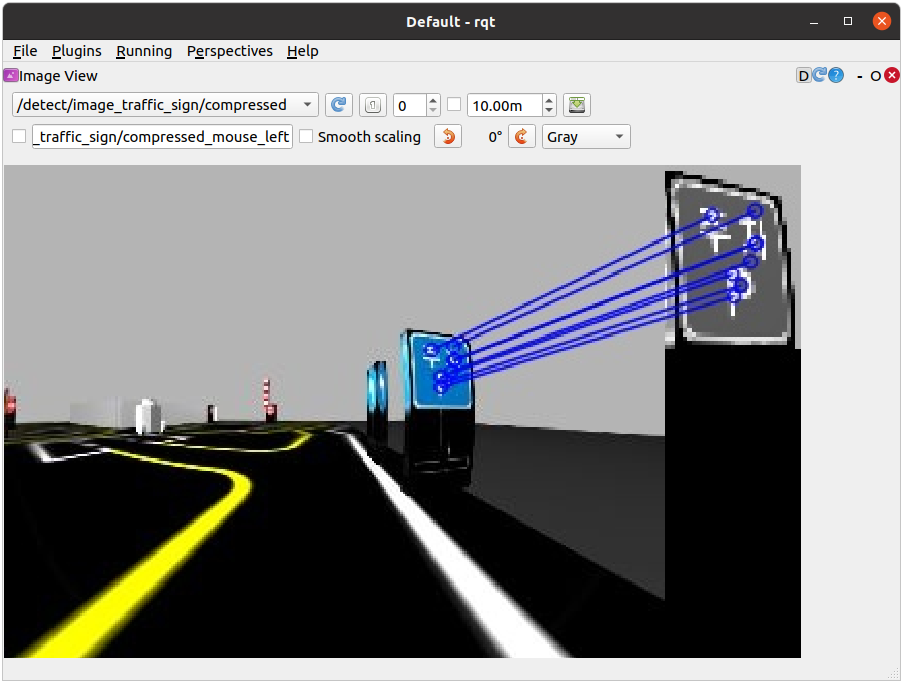
- 新终端,打开可视化界面,订阅话题
/detect/image_traffic_sign/compressed
$ rqt_image_view
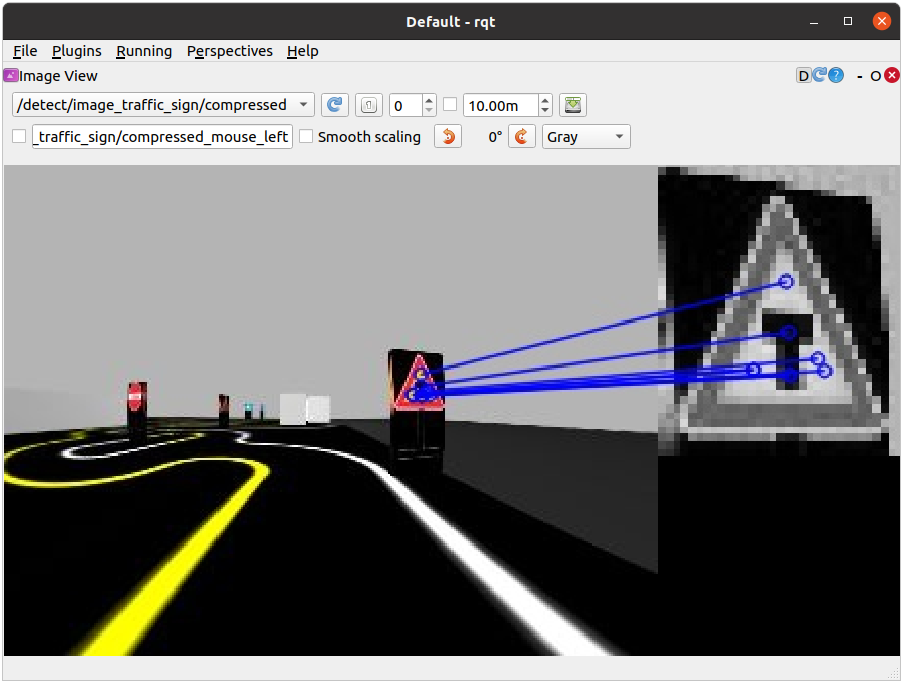
mission:=intersection: 交叉路口标志
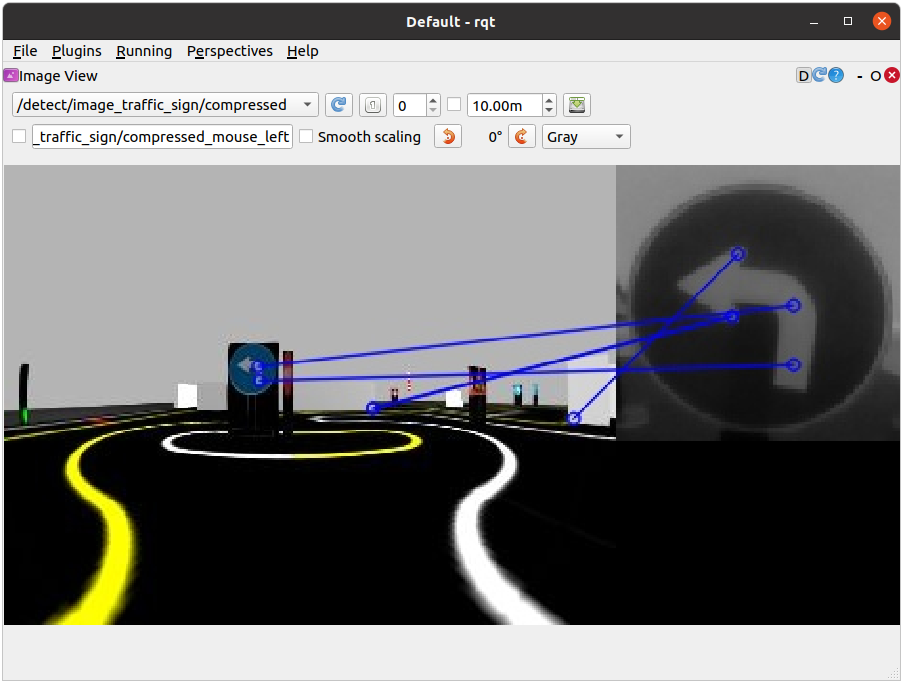
mission:=intersection: 左转标志
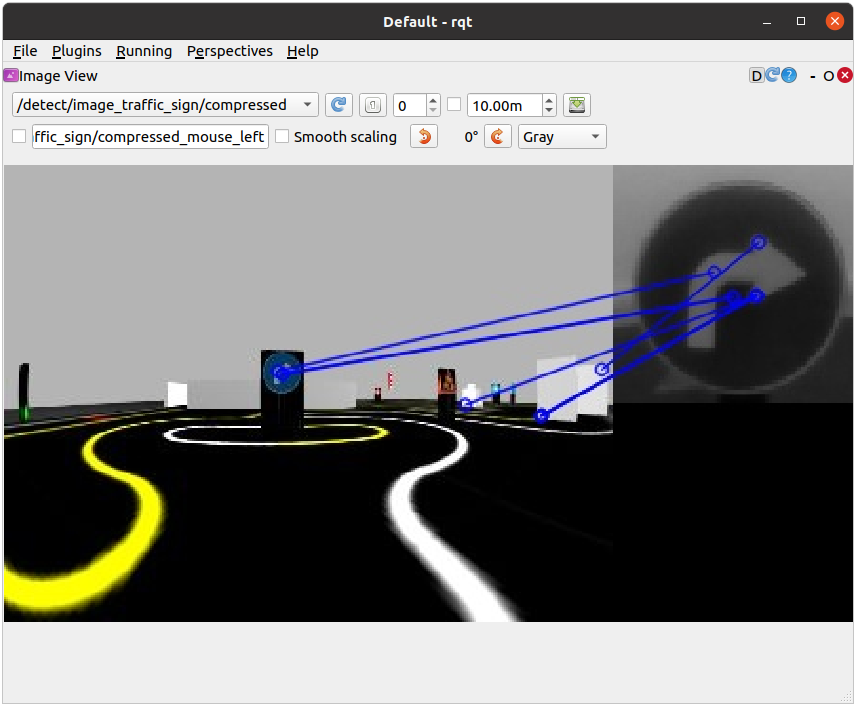
mission:=intersection: 右转标志
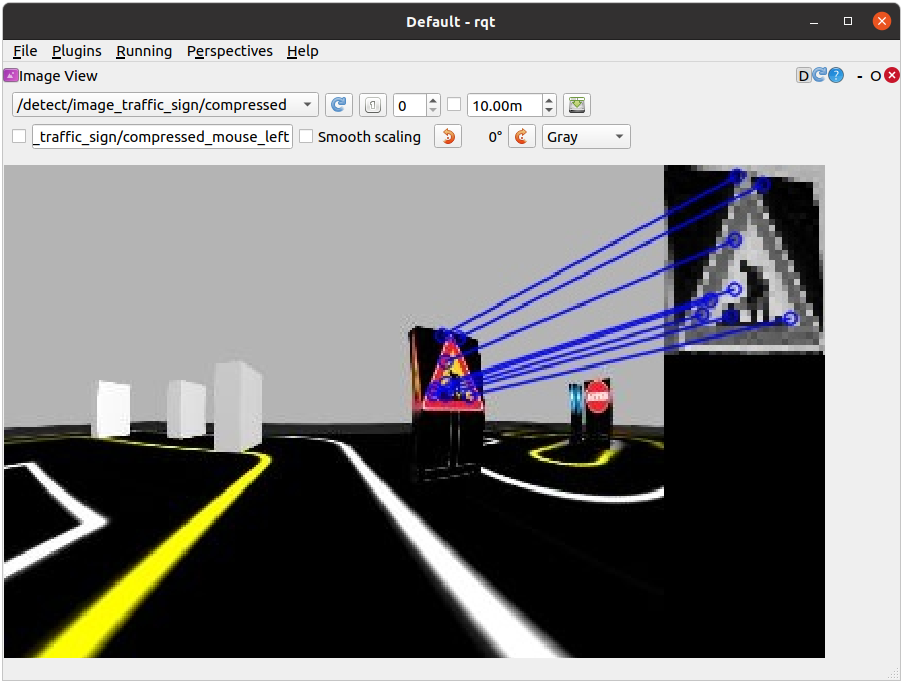
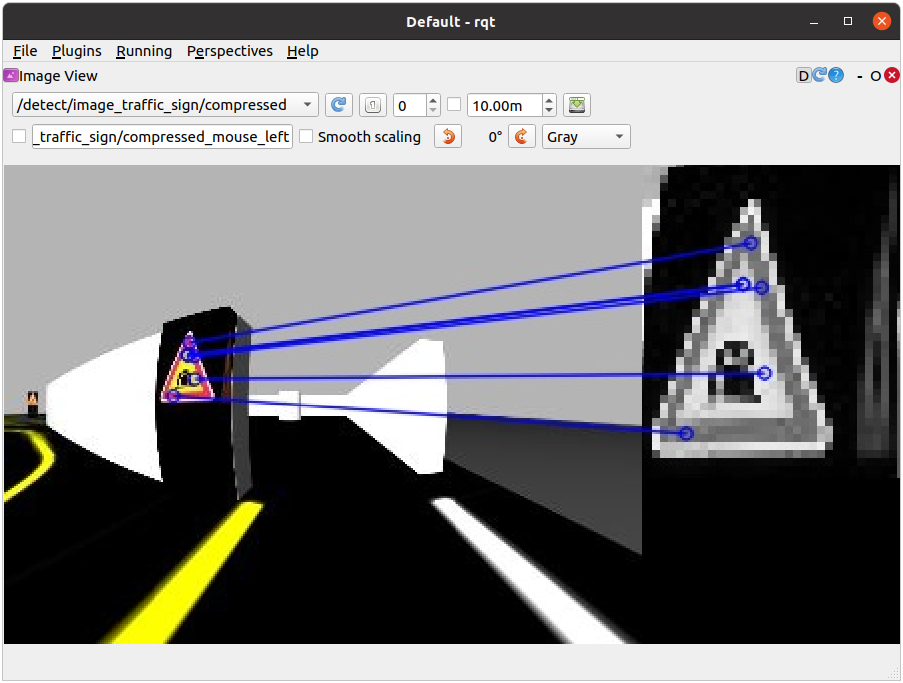
mission:=construction: 施工路段标志
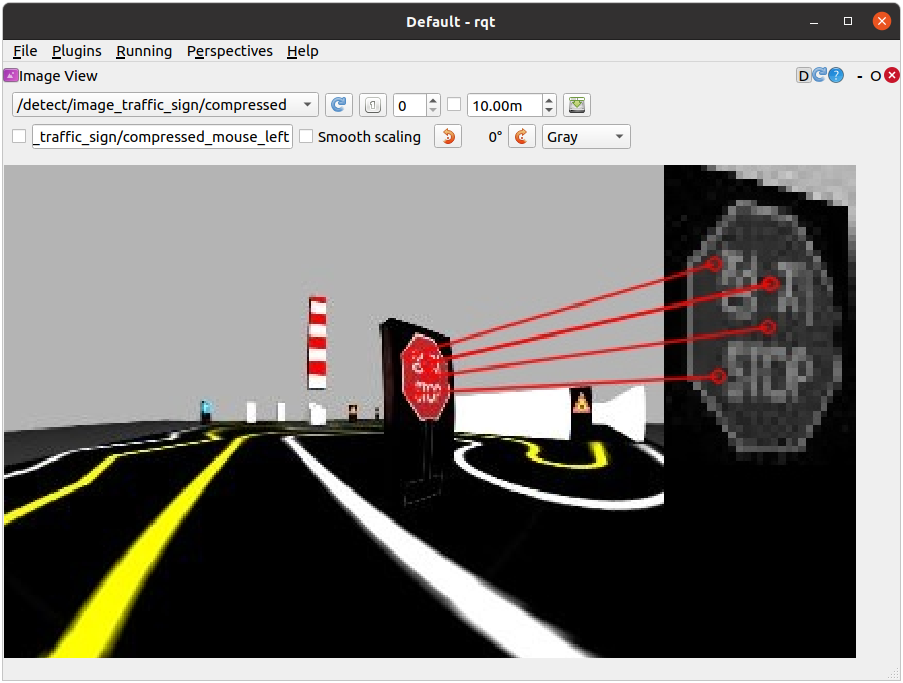
mission:=parking: 停车标志
mission:=level_crossing: 交通杆标志
mission:=tunnel:隧道标志
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号