



















Turtlebot3-waffle-pi入门教程#noetic版#-雷达测试
Turtlebot3-waffle-pi入门教程#noetic版#-雷达测试
说明:
- 本教程主要介绍TB3上如何进行雷达测试
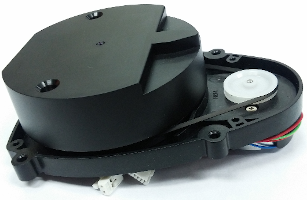
- TurtleBot3的雷达自2022年起已更新为
LDS-02型号,请根据使用的雷达来进行对应的测试
相关设备
- TB3套件:采购地址
LDS-02雷达操作步骤

- [Remote PC] 启动roscore
$ roscore
- [TurtelBot] 启动雷达
$ roslaunch ld08_driver ld08.launch
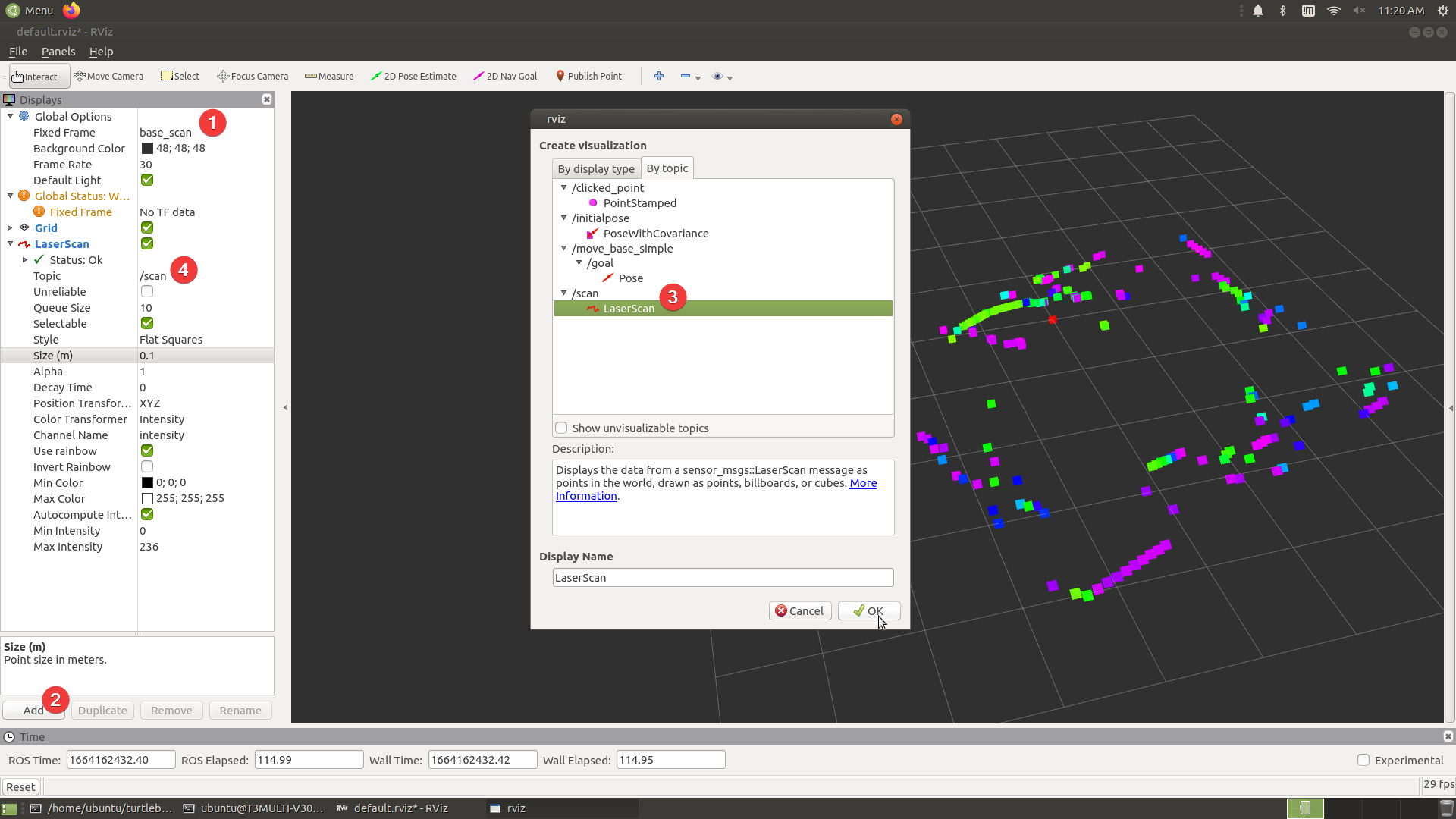
- [Remote PC] 启动rviz
$ rviz
- 设置
Fixed Frame参数的值为base_scan;侧边栏添加LaserScan项,设置Topic参数的值为/scan
LDS-01雷达操作步骤
- [Remote PC] 启动roscore
$ roscore
- [TurtelBot] 启动雷达
$ roslaunch hls_lfcd_lds_driver hlds_laser.launch
- [Remote PC] 查看雷达发布的话题信息
$ rostopic echo /scan
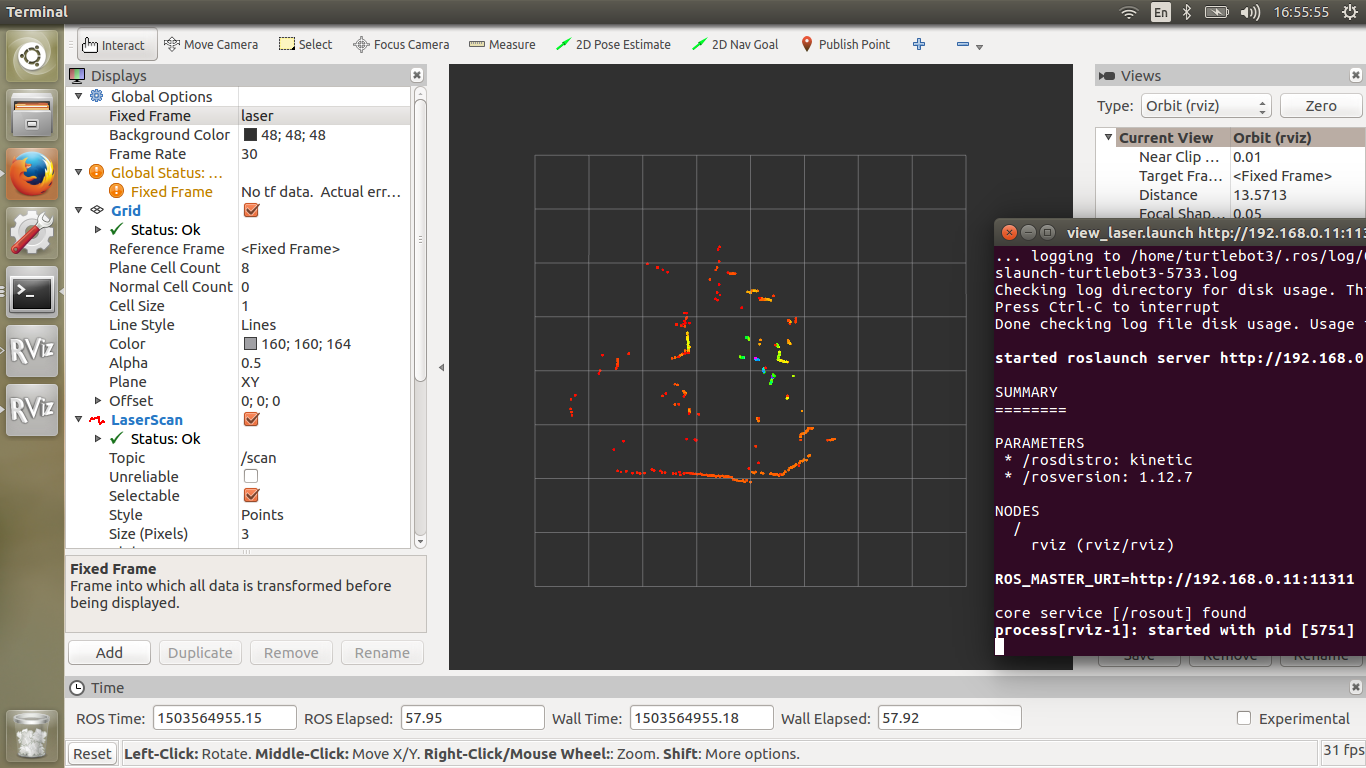
- [Remote PC] 启动rviz
$ rosrun rviz rviz -d `rospack find hls_lfcd_lds_driver`/rviz/hlds_laser.rviz
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号