



















ROS2与Gazebo11入门教程-Oculus Rift虚拟现实头显
说明:
- 介绍Oculus Rift虚拟现实头显
简介
Gazebo 6及更高版本支持Oculus Rift虚拟现实头显(VR headset)DK1和DK2。
学习完本节教程后,您就可以将一个虚拟的Oculus相机添加到模型的一个视觉链接上。
OculusVR SDK安装
- 请按照以下指令为Gazebo安装相应版本的Oculus SDK:
sudo apt-get install libusb-dev libudev-dev libxinerama-dev libxrandr-dev
hg clone https://bitbucket.org/osrf/oculussdk
cd oculussdk
mkdir build
cd build
cmake .. -DCMAKE_INSTALL_PREFIX=/usr
make
sudo make install
sudo cp ../LibOVR/90-oculus.rules /etc/udev/rules.d/
sudo udevadm control --reload-rules
编译Gazebo以支持OculusVR
一旦安装好了Oculus VR SDK,就应该能够从源代码编译Gazebo以支持Oculus Rift虚拟现实头显设备。
请按照这些安装说明编译Gazebo。在执行cmake命令期间,应该会看到以下确认已发现Oculus SDK的消息:
-- checking for module 'OculusVR'
-- found OculusVR, version 0.4.4
配置
在启动Gazebo之前,必须告知Gazebo创建一个新窗口,该窗口将由Oculus头显渲染。具体配置步骤如下:
在打开Oculus头显之前,请进入到Ubuntu系统中的“应用程序(Application)”>“系统工具(System Tools)”>“首选项(Preferences)”>“显示(Displays)”。
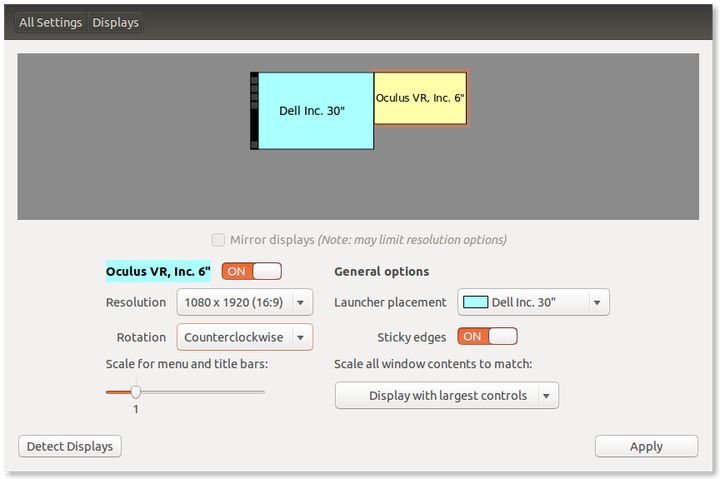
插上电源并打开Oculus Rift头显设备。请注意,您的主启动器可能已移至该头显设备。应该确保Oculus窗口的位置正确:
将Oculus显示窗口拖到主显示窗口的右上角。
确保Oculus显示窗口垂直放置,可能需要将其Rotation设置为Counterclockwise。详见下图。
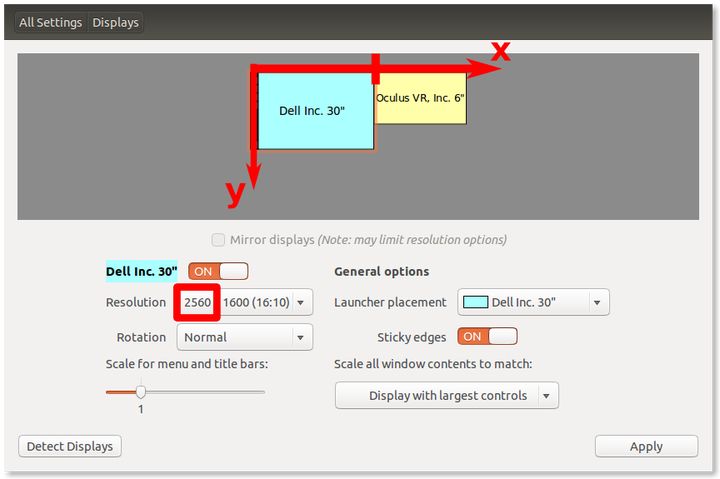
- 需要告知Gazebo我们将Oculus屏幕放置在哪里,即在主显示窗口的右上角。其水平坐标将是主监视器的末端(x =监视器宽度),而其垂直坐标将是屏幕的顶端(y = 0)。
- 打开您喜欢用的文本编辑器,并用以下内容编辑~/.gazebo/gui.ini文件:
[geometry]
x=0
y=0
[oculus]
x=<REPLACE_BY_YOUR_HORIZONTAL_RESOLUTION>
y=0
visual=<REPLACE_BY_THE_VISUAL_LINK_ATTACHED_TO_OCULUS>
autolaunch=0
将x替换为显示器的水平分辨率值,并将visual替换为Oculus Rift将附加到的视觉效果名称。
例如,这是一个示例gui.ini文件的内容:
[geometry]
x=0
y=0
[oculus]
x=2560
y=0
visual=camera::link::visual
autolaunch=0
运行
- 在一个终端中,运行oculusd守护程序,命令为:
cd ~/oculussdk
./oculusd
- 在第二个终端中,运行Gazebo,命令为:
gazebo worlds/camera.world
一旦Gazebo启动起来并处于运行中,就点击“窗口(Window)”->“Oculus Rift”菜单项,这样就应该可以从您的Oculus头显设备中看见该仿真世界。
也可以设置在启动Gazebo时默认启用Oculus窗口。这需要修改gui.ini文件并设置autolaunch=1。现在,用以下命令启动Gazebo,您的Oculus Rift头显设备应该无需任何干预应该就可以正常工作:
gazebo worlds/camera.world
参考:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号