



















ROS2与Gazebo11入门教程-逻辑相机传感器(Logical Camera Sensor)
说明:
- 介绍逻辑相机传感器
逻辑相机
- 相机输出的是图像,而逻辑相机输出的则是模型名称和位姿。 逻辑相机可以显示在同一位置上的相机可能看见哪些模型
逻辑相机示例
- 下载并保存这个仿真世界,其世界文件内容如下所示:
<?xml version="1.0" ?>
<sdf version="1.6">
<world name="default">
<include>
<uri>model://sun</uri>
</include>
<model name="post">
<pose>0 0 1 0 0 3.14159</pose>
<static>true</static>
<link name="link">
<sensor name="logical_camera" type="logical_camera">
<logical_camera>
<near>0.55</near>
<far>2.5</far>
<horizontal_fov>1.05</horizontal_fov>
<aspect_ratio>1.8</aspect_ratio>
</logical_camera>
<visualize>true</visualize>
<always_on>true</always_on>
<update_rate>10</update_rate>
</sensor>
</link>
</model>
<model name="target_box">
<static>true</static>
<pose>-2 0 1 0 0 0</pose>
<link name="link">
<collision name="collision">
<geometry>
<box>
<size>1 1 1</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>1 1 1</size>
</box>
</geometry>
</visual>
</link>
</model>
</world>
</sdf>
- 启动该仿真世界,命令为:
gazebo --verbose ./tutorial_logical_camera.world
从Gazebo顶部菜单栏中点击“窗口(Window)”菜单,然后点击“话题可视化(Topic Visualization)”菜单项。
选择/gazebo/default/post/link/logical_camera/models话题。该话题会在消息类型gazebo.msgs.LogicalCameraImage下列出。
这样就应该可以看见如下图所示的结果。
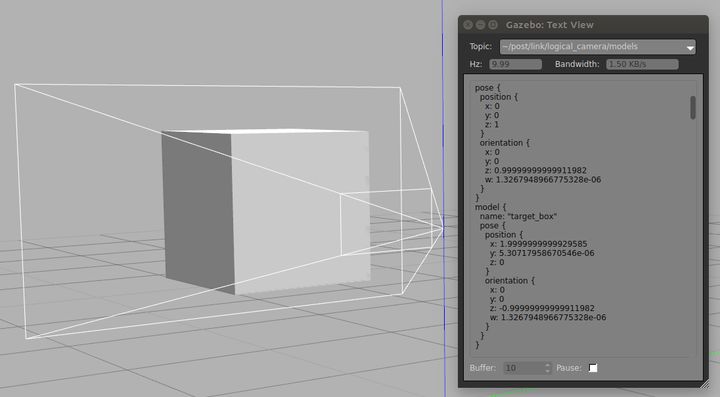
数据说明
逻辑摄像机会报告其看到的模型的名称和位姿。
普通相机看到的是
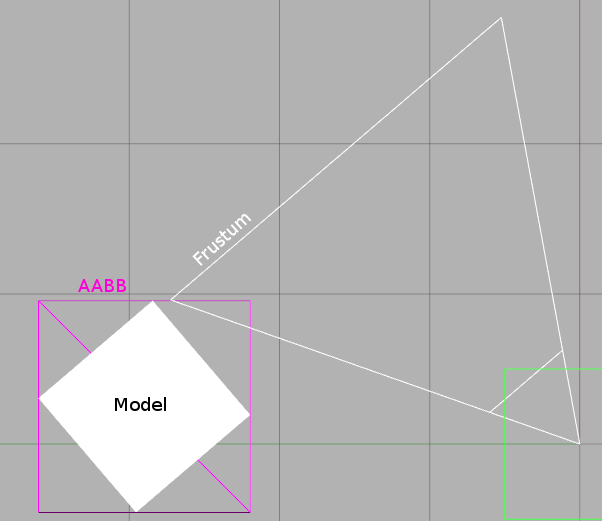
几何体,而逻辑相机看到的则是 几何体。逻辑相机通过测试其视锥(frustum)与模型的轴对齐边界框(AABB)是否相交来工作。模型的AABB大小正好足以容纳其整个 几何体。
模型名称
逻辑相机报告的模型名称是作用域名称。
仿真世界中
的模型其作用域名称为robot。 如果该模型具有嵌套模型<model name =“ hand”>,则嵌套模型的作用域名称是robot :: hand。
作用域名称可用于获取指向该模型的指针。
// Get the world (named "default")
gazebo::physics::WorldPtr world = physics::get_world("default");
// Get a model by name
gazebo::physics::ModelPtr handModel = world->GetModel("robot::hand");
模型位姿
- 逻辑相机输出其看到的相对于自身位姿的模型位姿。逻辑相机还输出其自身在仿真世界坐标中的位姿。
- 使用其自身位姿可以获得模型在仿真世界坐标系中的位姿。
// msg is of type gazebo::msgs::LogicalCameraImage
// Pose of camera in world coordinates
ignition::math::Pose3d cameraPose = gazebo::msgs::ConvertIgn(msg.pose());
// Pose of first model relative to camera
ignition::math::Pose3d modelRelativePose = gazebo::msgs::ConvertIgn(msg.model(0).pose());
// Pose of first model in world coordinates
ignition::math::Pose3d modelWorldPose = modelRelativePose - cameraPose;
假正例(False Positives)
逻辑相机的输出可能会包含普通相机无法看到的模型,如果存在以下情况的话:
模型没有
。 模型的
是透明的。 与模型的
相比,模型的 更大或位于不同的位置上。 模型被另一个模型遮挡住了。
模型在仿真世界中被旋转以至于其AABB在视锥中,但几何体不在视锥中。由于模型AABB的体积大于或等于该模型上碰撞几何体的体积,因此这个额外体积的某些部分可能会与视锥相交,但碰撞几何体没有与视锥相交的部分。下图展示了这一点:
负例(False Negatives)
逻辑相机的输出可能不包含普通相机可以看到的模型,如果存在以下情况的话:
模型
几何体比其 几何体更大或者在不同的位置上。 逻辑相机位于该模型上。逻辑相机永远不会在其输出中包含其所属的模型。但是,逻辑相机会包含其所属模型的任何嵌套模型或者父级模型。
模型唯一位于视锥中的部分是其嵌套模型。一个模型的AABB不包含其嵌套模型。每个嵌套模型都有其自己的AABB。如果只有嵌套模型是可见的,则在逻辑相机的输出中只会出现该嵌套模型。
SDF参数
update_rate,每秒仿真时间内传感器生成数据的次数。
topic,将消息发布到的Gazebo传输话题。如果此参数未指定,则传感器会在SDF中生成一个话题名称,该名称包含传感器父类的名称。
pose,如果模型、链接和传感器的位姿均为0,则仿真世界的X轴正方向会指向逻辑相机的中心。
visualize,如果设置为true,则相机的视锥会在Gazebo客户端中可视化。
logical_camera
near,传感器位姿到附近剪切平面上的最近点的距离(单位为米)。
far,传感器位姿到远处剪切平面上的最近点的距离(单位为米)。
horizontal_fov,相机的水平视场角(单位为弧度)。
aspect_ratio,相机的宽高比。宽高比与水平视场角相结合就可以定义相机的垂直视场角。
获取数据
- 有两种获取数据的方法:直接从传感器获取数据,或者使用Gazebo的传输节点。
- 两种方法都会返回一个LogicalCameraImage。
直接从传感器获取数据
数据可以直接从传感器获取。
这需要编写一个Gazebo插件才能访问传感器数据。只能获取最新生成的消息。
- 使用传感器名称获得一个通用传感器指针。
gazebo::sensors::SensorPtr genericSensor = sensors::get_sensor("model_name::link_name::my_logical_camera")
- 将该指针投射到一个LogicalCameraSensor上。
sensors::LogicalCameraSensorPtr logicalCamera = std::dynamic_pointer_cast<sensors::LogicalCameraSensor>(genericSensor);
- 调用LogicalCamera::Image()函数来获取最新的传感器数据。
gazebo::msgs::LogicalCameraImage sensorOutput = logicalCamera->Image();
使用Gazebo传输节点获取数据
逻辑相机传感器数据是使用Gazebo传输节点进行发布的。数据在生成后会立即发布给订阅者。
- 创建一个Gazebo传输节点并对其进行初始化。
gazebo::transport::NodePtr node(new gazebo::transport::Node());
node->Init();
- 为订阅创建一个回调函数。
/////////////////////////////////////////////////
// Function is called everytime a message is received.
void callback(gazebo::msgs::ConstLogicalCameraImagePtr &_msg)
{
// your code here
}
- 对逻辑相机发布的话题进行侦听。
gazebo::transport::SubscriberPtr sub = node->Subscribe("~/post/link/logical_camera/models", callback);
参考:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号