



















ROS2与Gazebo11入门教程-制作简单的抓手模型
说明:
- 介绍如何制作简单的抓手模型
设置模型目录
制作抓手模型
- 为仿真世界文件新建一个目录并进入该目录,命令为:
mkdir ~/simple_gripper_tutorial; cd ~/simple_gripper_tutorial
- 创建一个世界文件:
gedit ~/simple_gripper_tutorial/gripper.world
- 将以下SDF代码行复制到gripper.world文件中:
<?xml version="1.0"?>
<sdf version="1.4">
<world name="default">
<!-- A ground plane -->
<include>
<uri>model://ground_plane</uri>
</include>
<!-- A global light source -->
<include>
<uri>model://sun</uri>
</include>
<include>
<uri>model://my_gripper</uri>
</include>
</world>
</sdf>
- 在~/.gazebo目录中新建一个模型目录。
- 我们会将模型文件放在该目录中:
mkdir -p ~/.gazebo/models/my_gripper
cd ~/.gazebo/models/my_gripper
现在来布局抓手的基本结构。完成此项任务的最简单方法是创建一个静态(static)模型并每次添加一个链接。静态模型意味着当仿真器启动时,该链接不会移动。这样允许您在启动仿真器的情况下,可以在添加关节之前从视觉上检查该链接的位置是否合适。
新建一个模型配置文件model.config,命令为:
gedit model.config
- 然后将以下内容复制到该配置文件中:
<?xml version="1.0"?>
<model>
<name>My Gripper</name>
<version>1.0</version>
<sdf version='1.4'>simple_gripper.sdf</sdf>
<author>
<name>My Name</name>
<email>me@my.email</email>
</author>
<description>
My awesome robot.
</description>
</model>
- 用类似的方法,新建一个simple_gripper.sdf文件:
gedit simple_gripper.sdf
- 将以下代码复制到该SDF文件中:
<?xml version="1.0"?>
<sdf version="1.4">
<model name="simple_gripper">
<link name="riser">
<pose>-0.15 0.0 0.5 0 0 0</pose>
<inertial>
<pose>0 0 -0.5 0 0 0</pose>
<inertia>
<ixx>0.01</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.01</iyy>
<iyz>0</iyz>
<izz>0.01</izz>
</inertia>
<mass>10.0</mass>
</inertial>
<collision name="collision">
<geometry>
<box>
<size>0.2 0.2 1.0</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>0.2 0.2 1.0</size>
</box>
</geometry>
<material>
<script>Gazebo/Purple</script>
</material>
</visual>
</link>
<link name="palm">
<pose>0.0 0.0 0.05 0 0 0</pose>
<inertial>
<inertia>
<ixx>0.01</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.01</iyy>
<iyz>0</iyz>
<izz>0.01</izz>
</inertia>
<mass>0.5</mass>
</inertial>
<collision name="collision">
<geometry>
<box>
<size>0.1 0.2 0.1</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>0.1 0.2 0.1</size>
</box>
</geometry>
<material>
<script>Gazebo/Red</script>
</material>
</visual>
</link>
<link name="left_finger">
<pose>0.1 0.2 0.05 0 0 -0.78539</pose>
<inertial>
<inertia>
<ixx>0.01</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.01</iyy>
<iyz>0</iyz>
<izz>0.01</izz>
</inertia>
<mass>0.1</mass>
</inertial>
<collision name="collision">
<geometry>
<box>
<size>0.1 0.3 0.1</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>0.1 0.3 0.1</size>
</box>
</geometry>
<material>
<script>Gazebo/Blue</script>
</material>
</visual>
</link>
<link name="left_finger_tip">
<pose>0.336 0.3 0.05 0 0 1.5707</pose>
<inertial>
<inertia>
<ixx>0.01</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.01</iyy>
<iyz>0</iyz>
<izz>0.01</izz>
</inertia>
<mass>0.1</mass>
</inertial>
<collision name="collision">
<geometry>
<box>
<size>0.1 0.2 0.1</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>0.1 0.2 0.1</size>
</box>
</geometry>
<material>
<script>Gazebo/Blue</script>
</material>
</visual>
</link>
<link name="right_finger">
<pose>0.1 -0.2 0.05 0 0 .78539</pose>
<inertial>
<inertia>
<ixx>0.01</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.01</iyy>
<iyz>0</iyz>
<izz>0.01</izz>
</inertia>
<mass>0.1</mass>
</inertial>
<collision name="collision">
<geometry>
<box>
<size>0.1 0.3 0.1</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>0.1 0.3 0.1</size>
</box>
</geometry>
<material>
<script>Gazebo/Green</script>
</material>
</visual>
</link>
<link name="right_finger_tip">
<pose>0.336 -0.3 0.05 0 0 1.5707</pose>
<inertial>
<inertia>
<ixx>0.01</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.01</iyy>
<iyz>0</iyz>
<izz>0.01</izz>
</inertia>
<mass>0.1</mass>
</inertial>
<collision name="collision">
<geometry>
<box>
<size>0.1 0.2 0.1</size>
</box>
/geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>0.1 0.2 0.1</size>
</box>
</geometry>
<material>
<script>Gazebo/Green</script>
</material>
</visual>
</link>
<static>true</static>
</model>
</sdf>
- 运行该世界文件以可视化地查看到目前为止我们创建的内容,命令为:
gazebo ~/simple_gripper_tutorial/gripper.world
- 这样您应该可以看到如下图所示的抓手:
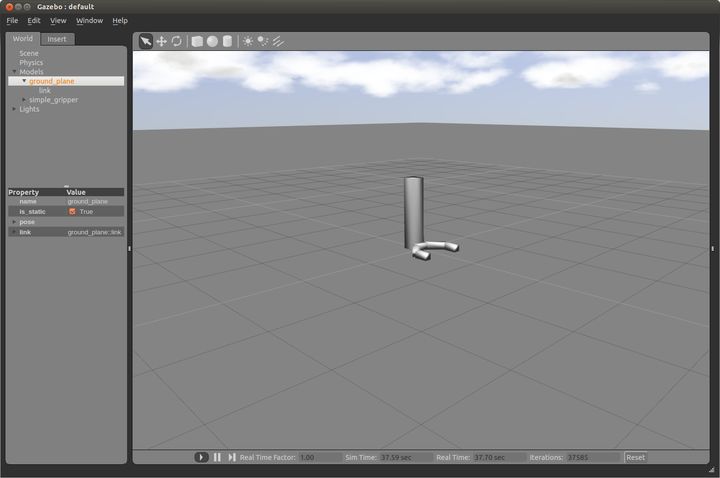
- 对该链接的布局满意后,就可以通过将以下代码复制到simple_gripper.sdf文件中行之前来添加关节。
gedit ~/.gazebo/models/my_gripper/simple_gripper.sdf
- 内容如下
<joint name="palm_left_finger" type="revolute">
<pose>0 -0.15 0 0 0 0</pose>
<child>left_finger</child>
<parent>palm</parent>
<axis>
<limit>
<lower>-0.4</lower>
<upper>0.4</upper>
</limit>
<xyz>0 0 1</xyz>
</axis>
</joint>
<joint name="left_finger_tip" type="revolute">
<pose>0 0.1 0 0 0 0</pose>
<child>left_finger_tip</child>
<parent>left_finger</parent>
<axis>
<limit>
<lower>-0.4</lower>
<upper>0.4</upper>
</limit>
<xyz>0 0 1</xyz>
</axis>
</joint>
<joint name="palm_right_finger" type="revolute">
<pose>0 0.15 0 0 0 0</pose>
<child>right_finger</child>
<parent>palm</parent>
<axis>
<limit>
<lower>-0.4</lower>
<upper>0.4</upper>
</limit>
<xyz>0 0 1</xyz>
</axis>
</joint>
<joint name="right_finger_tip" type="revolute">
<pose>0 0.1 0 0 0 0</pose>
<child>right_finger_tip</child>
<parent>right_finger</parent>
<axis>
<limit>
<lower>-0.4</lower>
<upper>0.4</upper>
</limit>
<xyz>0 0 1</xyz>
</axis>
</joint>
<joint name="palm_riser" type="prismatic">
<child>palm</child>
<parent>riser</parent>
<axis>
<limit>
<lower>0</lower>
<upper>0.9</upper>
</limit>
<xyz>0 0 1</xyz>
</axis>
</joint>
- 并通过设置
元素属性值为false以将该模型设置为非静态:
..
<static>false</static>
...
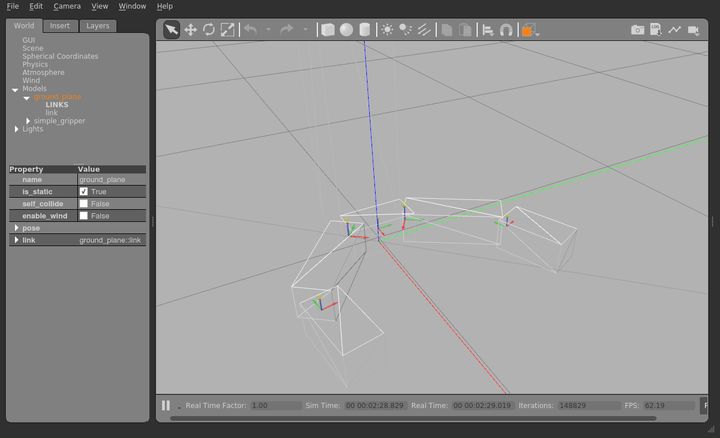
- 再次启动Gazebo,命令如下:
gazebo ~/simple_gripper_tutorial/gripper.world
- 右键单击该模型并选择“View->Joints”菜单和“View->Wireframe”菜单。这样新创建的关节就会显示出来:
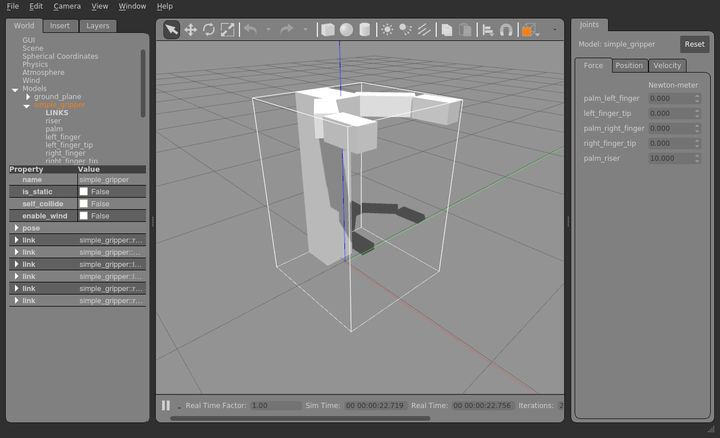
- 您还可以使用“关节控制(Joint Control)”小工具控制施加于每个关节上的力。单击抓手模型,然后通过单击GUI右侧的垂直手柄并将其拖动到左侧来展开右面板工具。在右面板中每个关节都可以看见一个滑块列表。选择“Force”选项卡,然后使用滑块将力施加到每个关节,这样您就应该可以看到抓手在移动。例如,将palm_riser上的力设置为10(牛顿),您就应该会看到如下图所示的效果:
可选:
- 向该仿真世界中添加一个小盒子或圆柱体,并将其放置在抓手中。
- 尝试使用关节控件GUI界面来抓取该小盒子或圆柱体对象。
可能需要调整对象的惯性使其合理。
参考:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号