



















ROS2与Gazebo11入门教程-向机器人添加传感器
说明:
- 介绍如何向机器人添加传感器
概述
- 将展示用户如何通过使用
标签和 连接一个组合模型的不同组件,直接从Gazebo模型数据库中的其他模型创建组合模型。
添加一个激光器
- 向机器人或者任何模型添加一个激光器,只需在该模型中包含传感器即可。
- 进入前一个教程中创建的模型目录,命令为:
cd ~/.gazebo/models/my_robot
用您喜欢的文本编辑器打开model.sdf文件。
在该文件末尾附近</ model>标签之前直接添加以下几行:
<include>
<uri>model://hokuyo</uri>
<pose>0.2 0 0.2 0 0 0</pose>
</include>
<joint name="hokuyo_joint" type="fixed">
<child>hokuyo::link</child>
<parent>chassis</parent>
</joint>
- include块告知Gazebo查找一个模型,并将其插入到相对于父级模型的给定
位置处。 - 在本例中,我们将hokuyo激光器放置在机器人的前方和上方。
块告知Gazebo该模型在其模型数据库中的位置(注意,可以在此处及相应的git存储库中看到这些教程使用的模型数据库uri的列表)。 - 新的
将插入的hokuyo激光器连接到机器人的底盘上。 - 关节类型为fixed(固定)以防止激光器移动。
- 该关节中的
名称源自hokuyo模型的SDF,其开头为: - 不要复制以下这些行,它们仅用于参考目的。
<?xml version="1.0" ?>
<sdf version="1.4">
<model name="hokuyo">
<link name="link">
在插入hokuyo模型时,hokuyo的链接将使用其模型名称来命名。
在本例中,模型名称为hokuyo,因此hokuyo模型中的每个链接都是以hokuyo::为开头的。
现在启动Gazebo,并使用GUI上的“Insert”选项卡将机器人添加到仿真中。
如果本地机器上没有hokuyo模型,则Gazebo会从模型数据库中提取下载该模型。
或者手动将该模型文件下载到本地缓存中,命令为:
cd ~/.gazebo/models
wget -q -R *index.html*,*.tar.gz --no-parent -r -x -nH http://models.gazebosim.org/hokuyo/
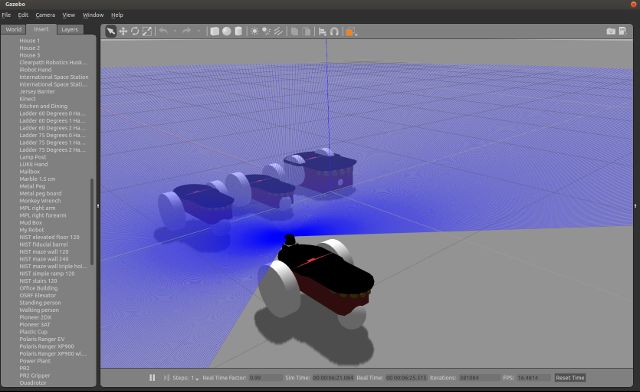
- 一旦启动Gazebo,您就应该会看到添加了一个激光器的机器人,如下图所示:
- (可选)尝试向机器人添加一个相机。
- 相机模型的URI为
model://camera。作为参考,可以在此处找到其SDF文档。
参考:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号