



















ROS2与Navigation2入门教程-配置Theta*规划器(Theta Star Planner)
说明:
- 介绍如何配置Theta*规划器(Theta Star Planner)
概述:
其源代码位于Github网站上。
Theta规划器实现了Theta路径规划器,旨在使用A*路径规划算法规划任意角度的路径。
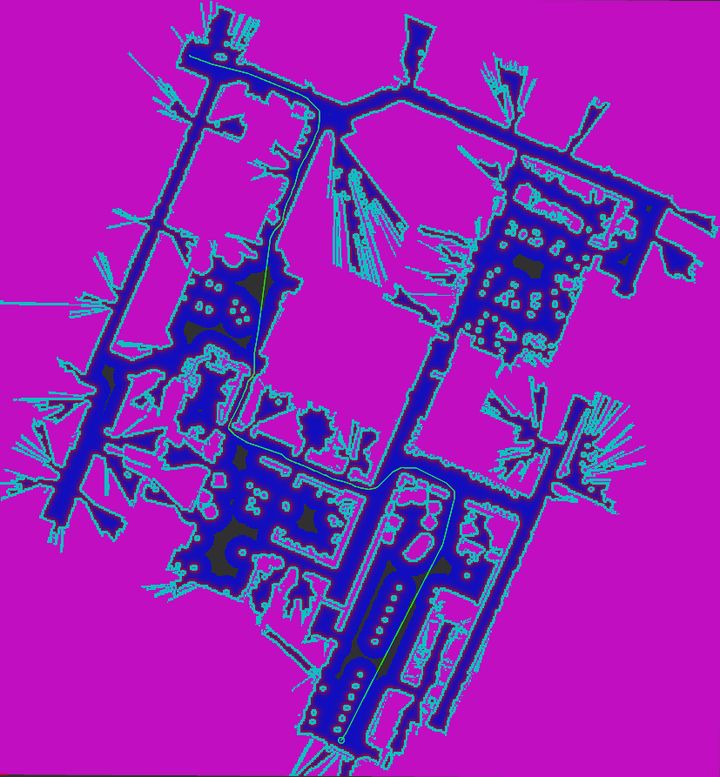
对于下图所示的示例,该规划器用时约46毫秒(平均值)计算了87.5米的路径。
是为该类型选择的相应规划器插件ID。
参数
Theta*规划器的参数有:
.how_many_corners参数:
数据类型:int
默认值:8
描述:要在4个连接(上、下、左、右)和8个连接(所有相邻单元格)图形扩展之间进行选择,即可接受的值为4和8。
.w_euc_cost参数:
数据类型:double
默认值:1.0
描述:用于设置施加在路径长度上的权重。
.w_traversal_cost参数:
数据类型:double
默认值:2.0
描述:此参数会调整高成本节点受到惩罚的严厉程度。从上面的 g(neigh) 方程中可以看出,成本函数的成本感知组件形成了一条抛物线,所以此参数的值增大时会使该曲线更陡峭,从而会导致不同成本节点之间更大的差异(当曲线变陡峭,成本增量也会随之增大)。
.w_heuristic_cost参数:
数据类型:double
默认值:1.0
描述:用于提供一个可接受的启发式方法,以便推荐值仅在请求时更改其值。通常将此参数值设置为与w_euc_cost参数值相同或1.0(以较小者为准),但可以增大w_heuristic_cost参数的值以加快进程。
- 注:请仔细阅读这个资源库链接上提供的README自述文件,以更好地了解如何调整Theta规划器。此规划器还要求调整成本地图的cost_scaling_factor参数,以获得好的结果。
示例
planner_server:
ros__parameters:
planner_plugin_types: ["nav2_theta_star_planner/ThetaStarPlanner"]
use_sim_time: True
planner_plugin_ids: ["GridBased"]
GridBased:
how_many_corners: 8
w_euc_cost: 1.0
w_traversal_cost: 2.0
w_heuristic_cost: 1.0
参考:
- https://navigation.ros.org/configuration/packages/configuring-thetastar.html
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号