



















ROS2与MoveIt2入门教程-MoveIt2简介
说明:
- 介绍MoveIt2
MoveIt2简介
- MoveIt2是专门为ROS 2从MoveIt迁移过来、主要用于机器人机械手或机械臂的运动规划软件框架,有助于将机器人带入未来。该框架综合了运动规划、机械(手)臂操纵、3D感知、运动学、控制和导航等方面的最新成果
MoveIt2的主要功能
- 该软件框架的主要功能包括:
- 运动规划
- 生成可顺利通过杂乱环境的高自由度轨迹
- 生成的轨迹或者路径可以避免(逃离)局部最小值
- 机械臂操纵
- 通过抓取生成(grasp generation)对机器人环境进行分析,并与该环境进行交互
- 逆运动学(Inverse Kinematics)
- 求解给定位姿的关节位置,甚至可用于过度制动的机械臂
- 控制
- 通过通用接口,对底层硬件控制器执行时间参数化的关节轨迹
- 3D感知
- 通过Octomaps,可以连接深度传感器和点云
- 碰撞检测
- 使用几何图元、网格或点云避开障碍物
- 运动规划
MoveIt2的主要特征
- 该软件框架的主要特征有:
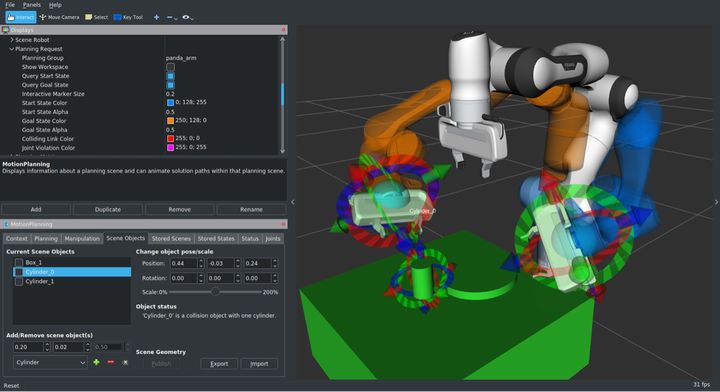
- 拥有3D交互式可视化工具Rviz,功能十分强大
- 该工具开箱即用的视觉展示功能允许新用户针对障碍物尝试各种避障规划算法。而在物理硬件上执行这些算法只需单击一下即可。
- 该工具开箱即用的视觉展示功能允许新用户针对障碍物尝试各种避障规划算法。而在物理硬件上执行这些算法只需单击一下即可。
- 可充分利用仿真工具Gazebo,技术处于前沿
- MoveIt通过充分利用基于物理的仿真工具,可以加速开发和测试周期。组合Gazebo、ROS Control和MoveIt,可以打造强大的机器人开发平台。
- MoveIt通过充分利用基于物理的仿真工具,可以加速开发和测试周期。组合Gazebo、ROS Control和MoveIt,可以打造强大的机器人开发平台。
- 具有向导式配置助手,使用非常容易
- 通过使用逐步配置向导或者使用普遍的预配置设置,可以快速设置任何机器人以使用MoveIt。还可以配置Gazebo和ROS Control。

- 通过使用逐步配置向导或者使用普遍的预配置设置,可以快速设置任何机器人以使用MoveIt。还可以配置Gazebo和ROS Control。
- 具有任务构造器,技术十分先进
- 可以一种灵活透明的方式来定义和规划由多个相互依赖的子任务组成的动作(actions)。
- 可以一种灵活透明的方式来定义和规划由多个相互依赖的子任务组成的动作(actions)。
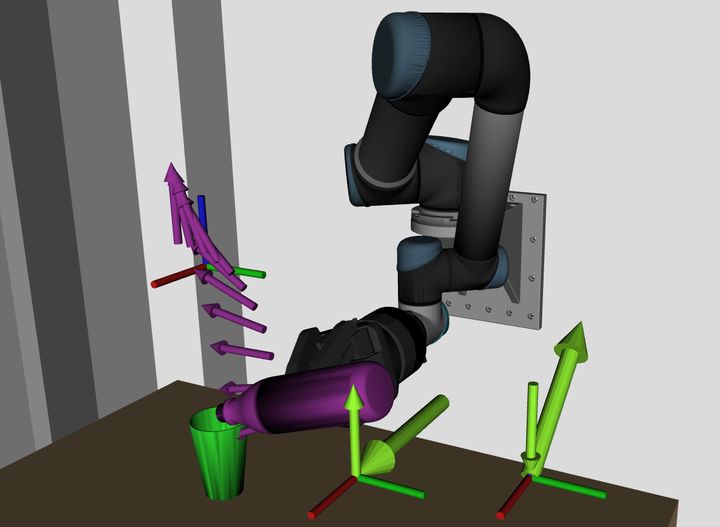
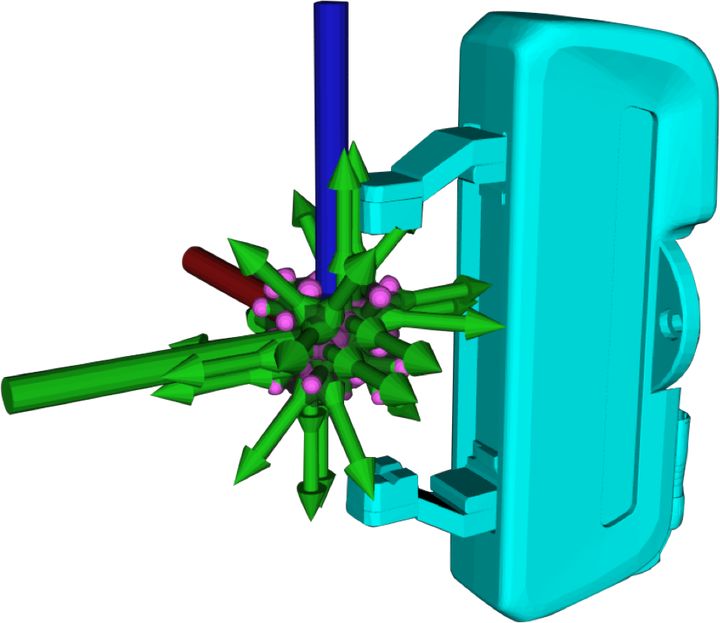
- 利用抓取生成技术,具有智能化特征
- 拥有基于几何和机器学习的抓取生成库,可用于MoveIt的机器人拾取和放置任务管道。
- 拥有基于几何和机器学习的抓取生成库,可用于MoveIt的机器人拾取和放置任务管道。
- 拥有3D交互式可视化工具Rviz,功能十分强大
为什么要使用MoveIt2?
- MoveIt是使用最广泛的机械臂操纵软件,已在150多种机器人上使用。该软件框架是根据 BSD 许可条款发布的,因此可以免费用于工业、商业和研究用途。
通过综合运动规划、机械臂操纵、3D感知、运动学、控制和导航方面的最新进展,MoveIt是最先进的移动机械臂操纵软件。
当前版本
- 截至目前(2021年10月),MoveIt2的版本为2.2,包含三个发行版或者分支,即适用于ROS 2 Foxy的Foxy 2.2 LST版本(长期支持版)、适用于ROS 2 Galactic的Galactic 2.2版本(推荐版本)、适用于ROS 2 Rolling的Rolling 2.2版本(开发版)。另外,目前维护的MoveIt版本为适用于ROS 1 Noetic的Noetic 1.1 LST版本
引用MoveIt相关论文
- 如果在研究中使用了MoveIt软件框架,请在您的出版物中包含以下引文之一:
(1)David Coleman, Ioan A. Șucan, Sachin Chitta, Nikolaus Correll, Reducing the Barrier to Entry of Complex Robotic Software: a MoveIt! Case Study, Journal of Software Engineering for Robotics, 5(1):3–16, May 2014. doi: 10.6092/JOSER_2014_05_01_p3.
(2)Ioan A. Sucan and Sachin Chitta, "MoveIt", [Online] Available at moveit.ros.org.
(3)M. Görner, R. Haschke, H. Ritter, and J. Zhang, “Moveit! task constructor for task-level motion planning,” in IEEE Intl. Conf. on Robotics and Automation, pp. 190–196, May 2019. doi: 10.1109/ICRA.2019.8793898.
英语原文网址:https://moveit.ros.org/
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号