



















Turtlebot3-burger入门教程#noetic版#-启动测试
Turtlebot3-burger入门教程#noetic版#-启动测试
说明:
- 本教程介绍如何启动burger
相关设备
- TB3套件:采购地址
操作步骤
- [Remote PC] 启动roscore
$ roscore
- [TurtleBot] 启动burger
$ roslaunch turtlebot3_bringup turtlebot3_robot.launch
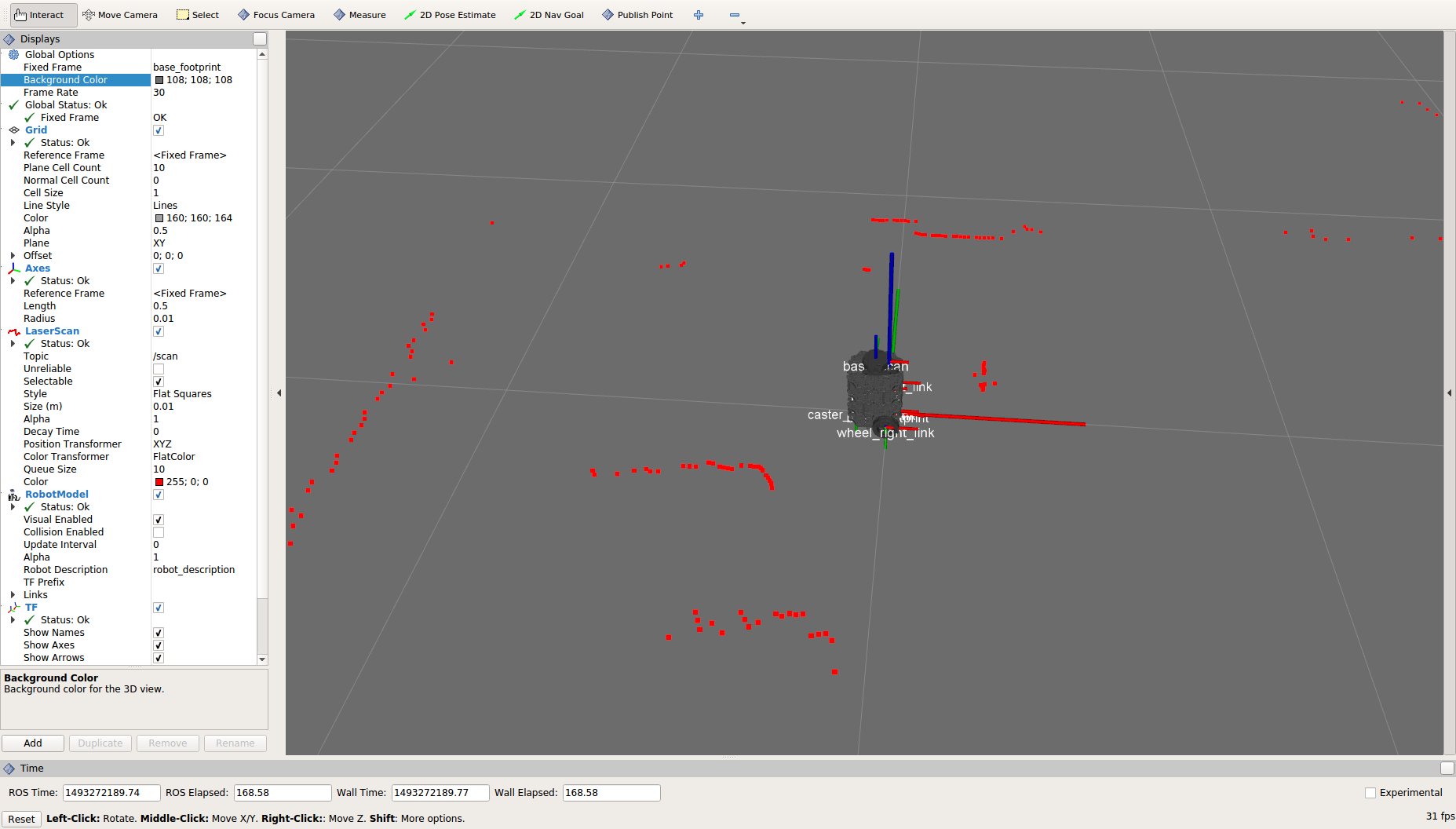
- [Remote PC] 启动rviz
$ export TURTLEBOT3_MODEL=burger
$ roslaunch turtlebot3_bringup turtlebot3_model.launch
- [Remote PC] 查看剩余电量
$ rostopic echo /battery_state
header:
seq: 1
stamp:
secs: 1623917363
nsecs: 268977973
frame_id: ''
voltage: 11.0799999237
current: 0.0
charge: 0.0
capacity: 0.0
design_capacity: 1.79999995232
percentage: 0.998198151588
power_supply_status: 0
power_supply_health: 0
power_supply_technology: 0
present: True
cell_voltage: []
location: ''
serial_number: ''
---
header:
seq: 2
stamp:
secs: 1623917363
nsecs: 303977973
frame_id: ''
voltage: 11.0600004196
current: 0.0
charge: 0.0
capacity: 0.0
design_capacity: 1.79999995232
percentage: 0.996396422386
power_supply_status: 0
power_supply_health: 0
power_supply_technology: 0
present: True
cell_voltage: []
location: ''
serial_number: ''
- 其中
voltage为当前电压值
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号