



















ROS2入门教程- dummy robot demo
说明:
- 介绍如何使用dummy robot demo
步骤:
- 运行启动文件
source ~/ros2_ws/install/setup.bash
ros2 launch dummy_robot_bringup dummy_robot_bringup.launch.py
- 结果如下
[INFO] [launch]: process[dummy_map_server-1]: started with pid [25812]
[INFO] [launch]: process[robot_state_publisher-2]: started with pid [25813]
[INFO] [launch]: process[dummy_joint_states-3]: started with pid [25814]
[INFO] [launch]: process[dummy_laser-4]: started with pid [25815]
Initialize urdf model from file: /home/mikael/work/ros2/bouncy_ws/install_debug_isolated/dummy_robot_bringup/share/dum my_robot_bringup/launch/single_rrbot.urdf
Parsing robot urdf xml string.
Link single_rrbot_link1 had 1 children
Link single_rrbot_link2 had 1 children
Link single_rrbot_link3 had 2 children
Link single_rrbot_camera_link had 0 children
Link single_rrbot_hokuyo_link had 0 children
got segment single_rrbot_camera_link
got segment single_rrbot_hokuyo_link
got segment single_rrbot_link1
got segment single_rrbot_link2
got segment single_rrbot_link3
got segment world
Adding fixed segment from world to single_rrbot_link1
Adding moving segment from single_rrbot_link1 to single_rrbot_link2
[INFO] [dummy_laser]: angle inc: 0.004363
[INFO] [dummy_laser]: scan size: 1081
[INFO] [dummy_laser]: scan time increment: 0.000028
Adding moving segment from single_rrbot_link2 to single_rrbot_link3
Adding fixed segment from single_rrbot_link3 to single_rrbot_camera_link
Adding fixed segment from single_rrbot_link3 to single_rrbot_hokuyo_link
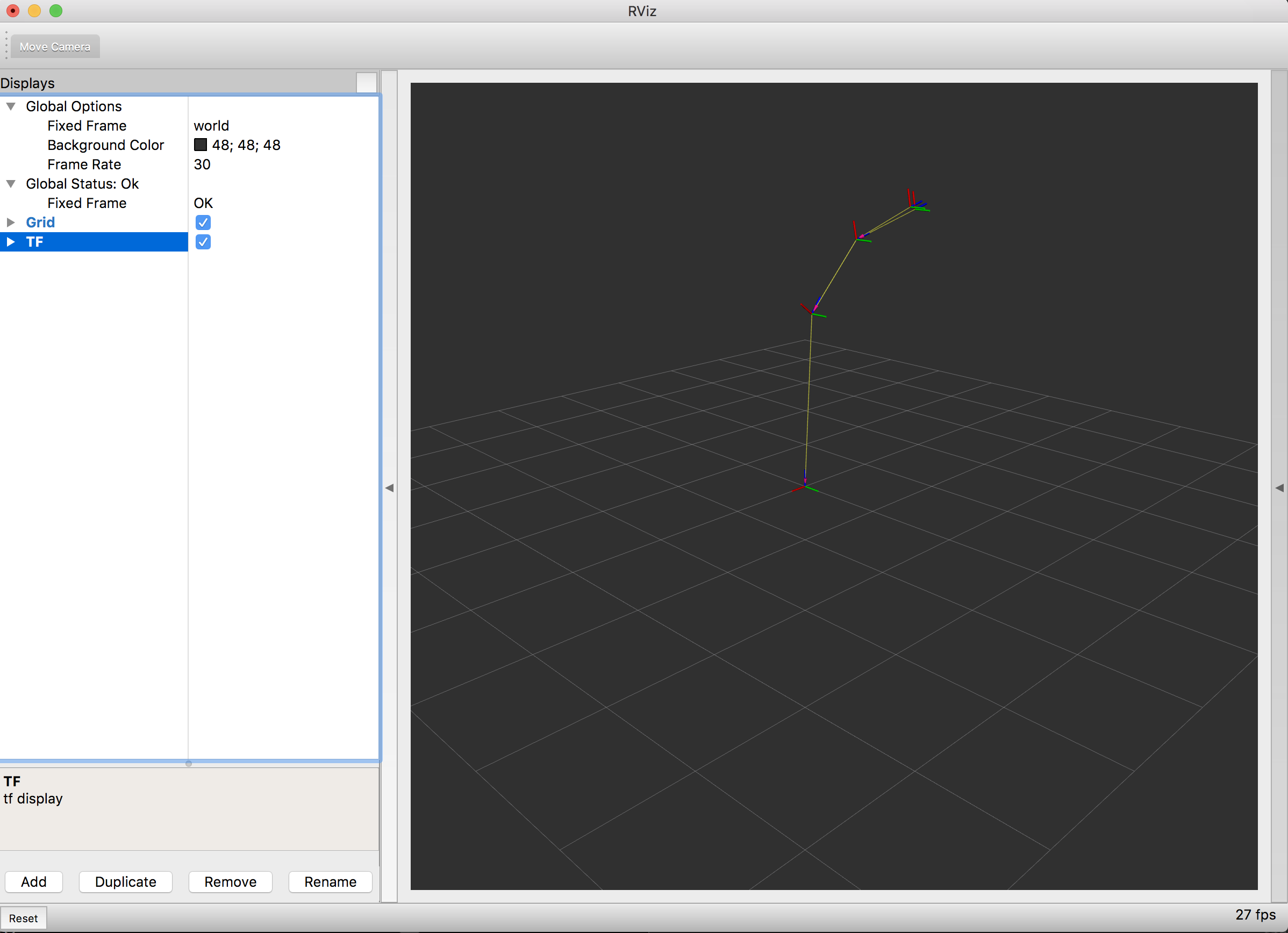
- 打开 RViz
$ source <ROS2_INSTALL_FOLDER>/setup.bash
$ rviz2
- 可以添加TF显示插件,并将全局框架配置为world
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号