



















pixugv无人车入门教程-导出和导入参数配置
pixugv无人车入门教程-导出和导入参数配置
说明:
- 本教程介绍如何在misson planner地面站上导出参数配置
- 测试环境:win10 + misson planner 1.3.62 + pixhawk 2.4.8 + ArduRover V4.0.0
相关设备:
- pixugv套件,采购地址
参数导出
用usb线连接PC和pixhawk
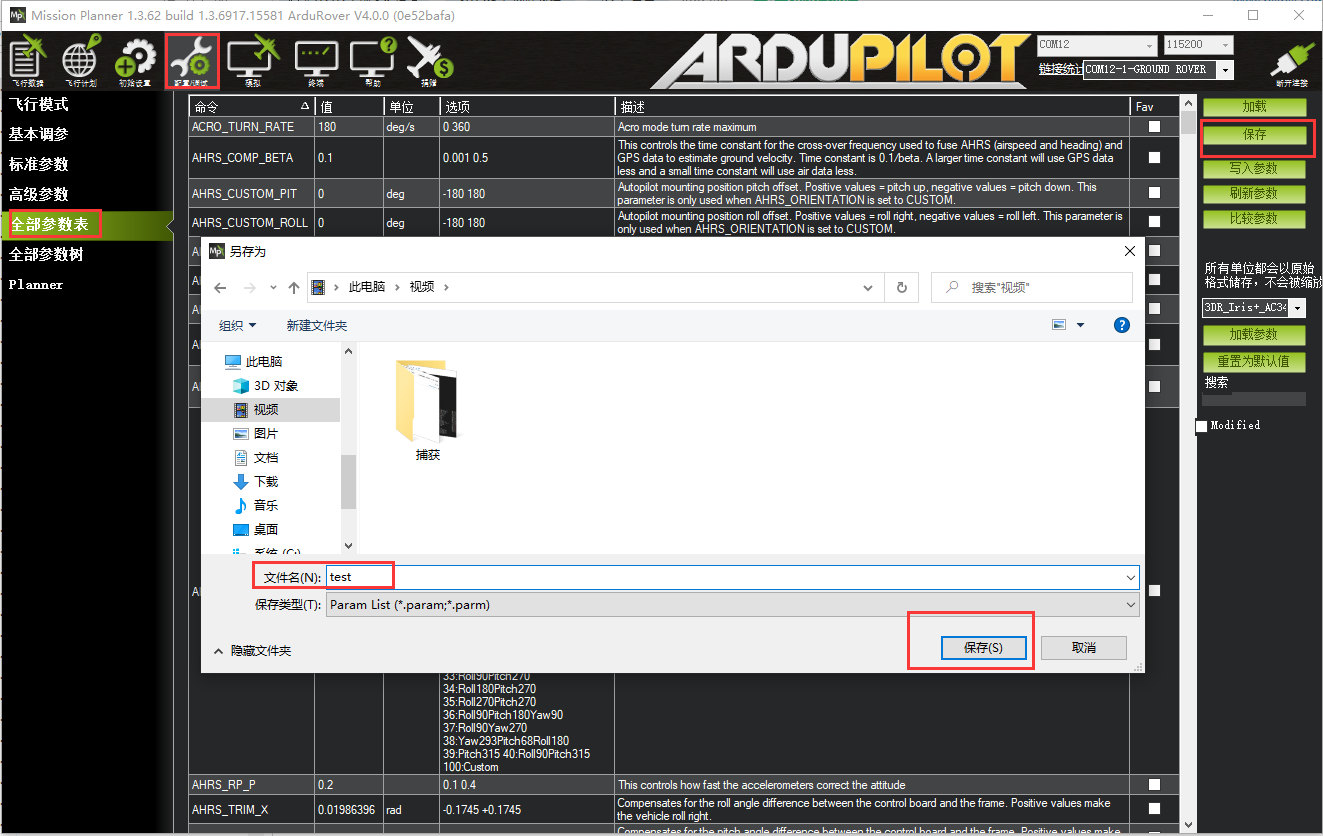
打开mp地面站 ->
配置/调试->全部参数表/全部参数树->保存
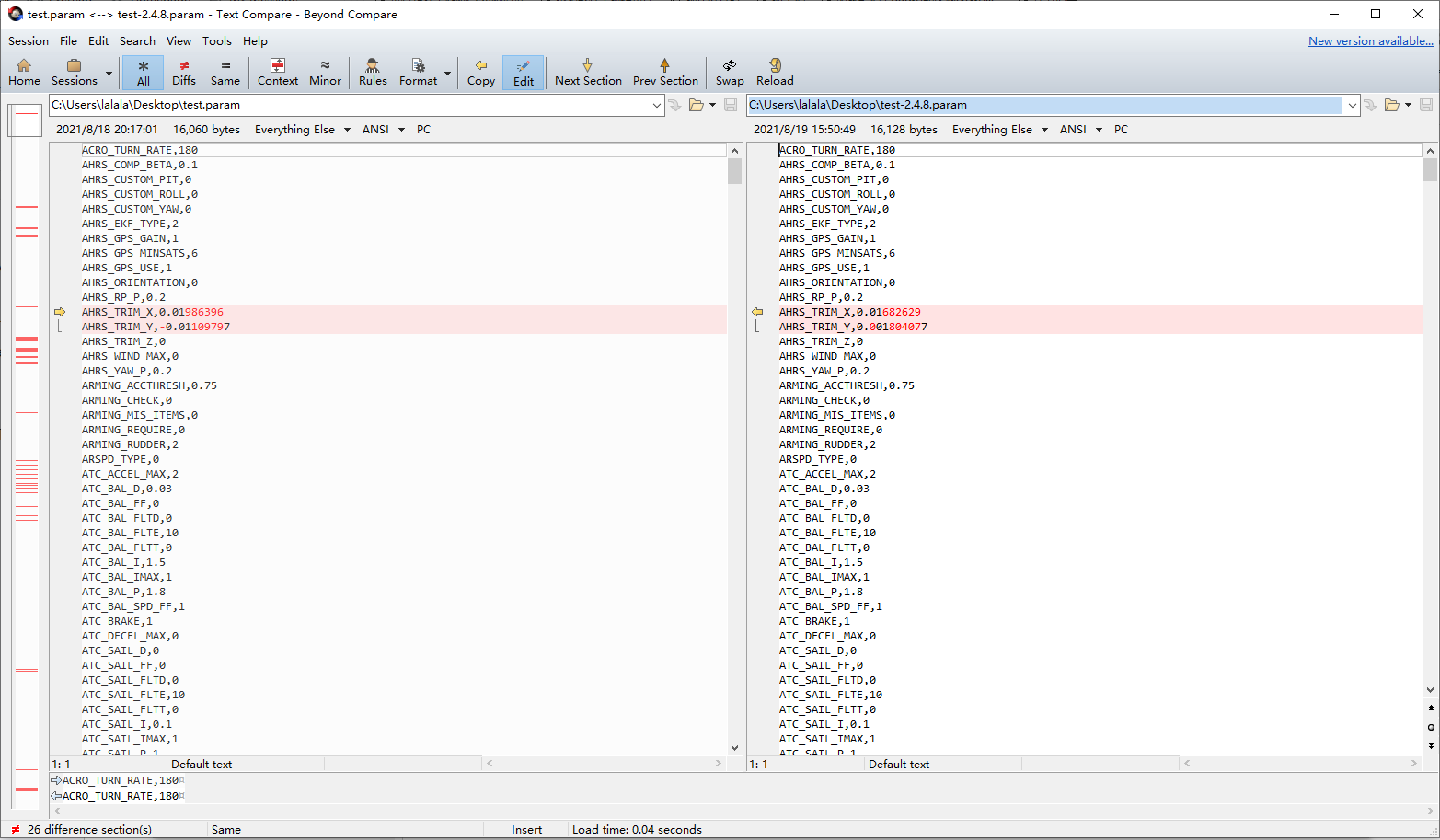
参数比较
- 当保存了多个参数配置时,可以用
Beyond compare等代码比较软件
参数导入
- 打开mp地面站 ->
配置/调试->全部参数表/全部参数树->比较参数->选择已保存的参数配置->点击 use 复选框来选择哪些修改的值-> 点击continue->写入参数->检查需要更改的值是否正确写入

通过图上
Value列为当前参数配置和NewValue列为想要比较的参数配置Use列的复选框表示是否需要将Value值更改换为NewValue值Check/Uncheck ALL复选框为全选或非全选
注意:但若只想比较两者参数的区别和不想导入参数,那就不要点击写入参数而是点击刷新参数
FAQ
有时候打开mission planner地面站时,没有找到
全部参数表/全部参数树的配置那么需要进行设置:打开mp地面站 ->
配置/调试->Planner->layout->Advance-> 切换出配置/调试界面在进入就能发现全部参数表/全部参数树的标签栏

获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号