



















pixusv无人船入门教程-飞行模式设置
pixusv无人船入门教程-飞行模式设置
说明:
本教程介绍如何在misson planner地面站上设置飞行模式
测试环境:misson planner 1.3.62 + pixhawk 2.4.8 + ArduRover V4.0.0 + 乐迪AT9S
相关设备
- pixusv无人船套件 | 采购地址
飞行模式介绍
- Rover常用的模式
0:Manual //手动模式
1:Acro //特技模式
4:Hold //保持模式
5:Loiter //留待模式
6:Follow //跟随模式
7:Simple //简单模式
10:Auto //自动模式
11:RTL //返航模式
12:SmartRTL //智能返航模式
15:Guided //引导模式
- 通常情况下,常用的模式有:Manual、Hold、Auto、RTL和Guided模式
操作步骤
连接pixhawk至Mission Planner
打开遥控器且确保遥控器与接收机匹对上
进入
Initial Setup(初始设置)->Mandatory Hardware(必要硬件)->Flight Modes(飞行模式)界面使用每行的下拉菜单选择飞行模式应用到这个开关位置上,确保至少有一个开关位置是给手动的
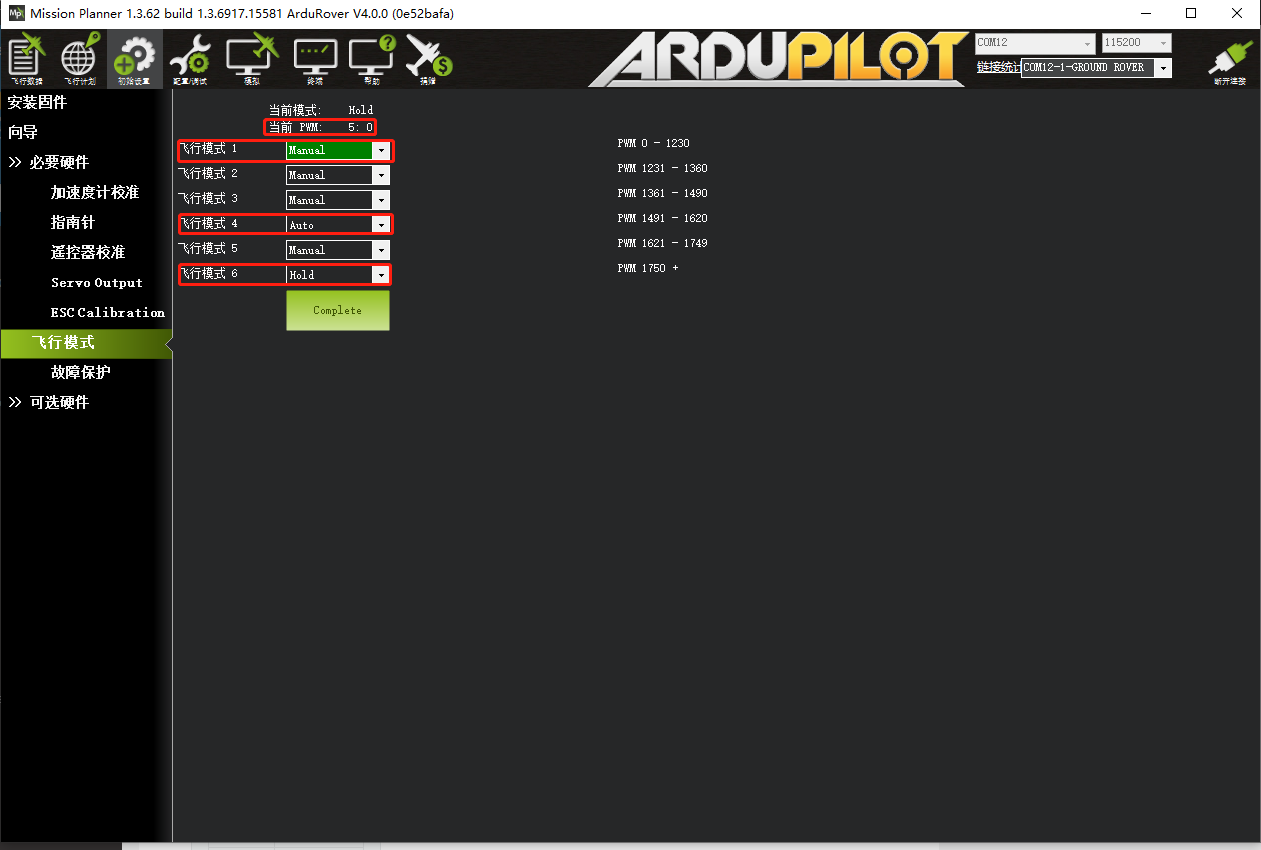
上述图片选择切换飞行模式的通道为通道5,故可以通过切换遥控器的通道5三段按钮时,模式选择界面上绿色高亮光标的变化来确定是正确配置
当完成时点击
保存模式按钮
注意:乐迪AT9S遥控器通常用右上的5通道作为快速切换飞行模式的按钮,而固件默认的切换飞行模式的按钮为8通道。修改切换飞行模式按钮的方式:
配置/调试->全部参数表-> 搜索MODE_CH参数 -> 将参数值设置为5->写入参数
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号