



















pixusv无人船入门教程-遥控器校准
pixusv无人船入门教程-遥控器校准
说明:
本次教程介绍如何在Mission Planner上校准遥控器
测试环境:Mission Planner 1.3.62 + Pixhawh2.4.8 + ArduRover V4.0.0 + 乐迪AT9S
相关设备
- pixusv无人船套件 | 采购地址
操作步骤
首先需要将遥控器接收机接上pixhawk上且对接上遥控器
校准前先要确定在移动遥控器的侧倾,俯仰,油门和偏航摇杆,并确保绿色条沿正确的方向移动
如果移动摇杆的方向与地面站上绿色条的反馈不相符,那么需要设置在遥控器上设置本来方向的反转
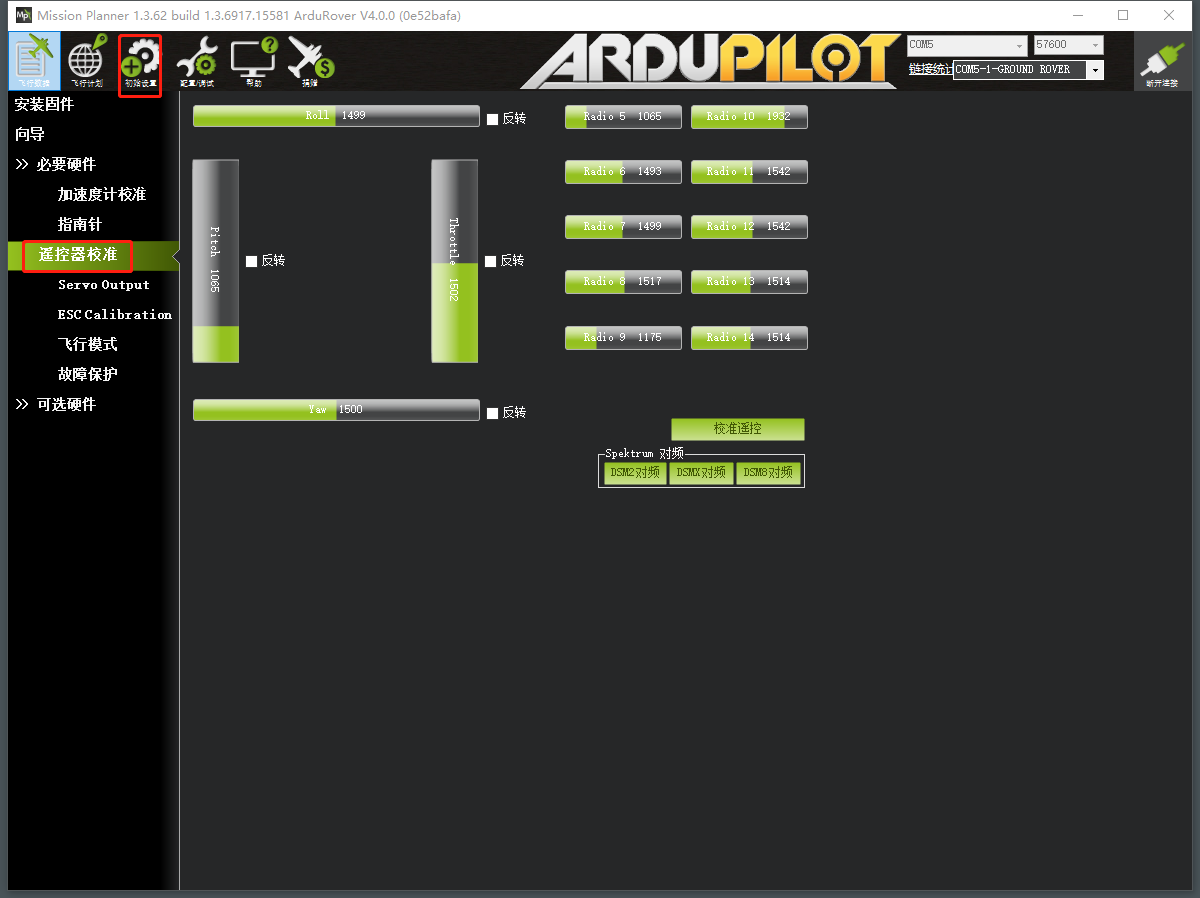
- 打开地面站 ->
初始设置->必要硬件->遥控器校准->校准遥控
注意:校准时,请不要接上电池、电机和螺旋桨

将遥控器的控制杆,旋钮和开关移至极限位置
红线将出现在校准条上,以显示到目前为止看到的最小值和最大值

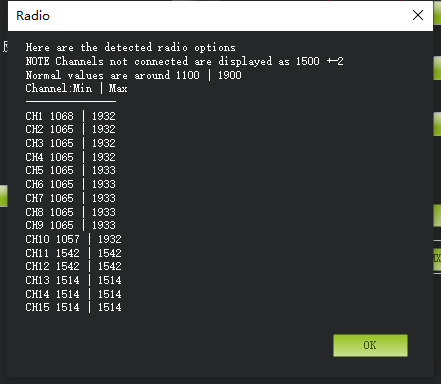
完成后点击完成按钮,同时会出现一个窗口,提示你需要确保所有摇杆居中,油门向下,此时将油门移至零,然后按“确定”
最后会出现校准数据的页面,通常最小值约为1100,最大值约为1900
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号