



















pixusv无人船入门教程-连接MP地面站
pixusv无人船入门教程-连接MP地面站
说明:
本教程介绍如何连接MissionPlanner地面站
测试环境:Win 10 + Mission Planner 1.3.62 + Pixhawk 2.4.8
相关设备
- pixusv无人船套件 | 采购地址
地面站安装
USB直接连接
- 使用micro USB数据线直接连接pixhawk

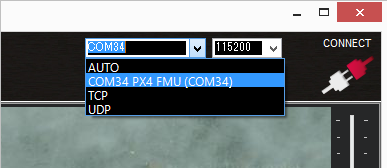
- 选择
PX4 FMU的端口,波特率选115200
数传连接
- 普通常见的数传,实际也是通过usb连接,一般数传的地面端都内置了USB转串口芯片

地面站选择特定端口号,波特率一般都是
57600连接时将数传的
Ground一端接到PC,Air一端接到pixhawk的TELEM1端口,同时接上飞控的电源

获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号