



















ROS与web入门教程-控制turtlebot3建图
ROS与web入门教程-控制turtlebot3建图
说明:
- 介绍如何通过页面控制turtlebot3建图
步骤:
- 增加新的模板slam2d.php
cd /home/ubuntu/web/cms/templates/Pages
cp ros.php slam2d.php
- 内容如下:
<?php
/**
* CakePHP(tm) : Rapid Development Framework (https://cakephp.org)
* Copyright (c) Cake Software Foundation, Inc. (https://cakefoundation.org)
*
* Licensed under The MIT License
* For full copyright and license information, please see the LICENSE.txt
* Redistributions of files must retain the above copyright notice.
*
* @copyright Copyright (c) Cake Software Foundation, Inc. (https://cakefoundation.org)
* @link https://cakephp.org CakePHP(tm) Project
* @since 0.10.0
* @license https://opensource.org/licenses/mit-license.php MIT License
* @var \App\View\AppView $this
*/
use Cake\Cache\Cache;
use Cake\Core\Configure;
use Cake\Core\Plugin;
use Cake\Datasource\ConnectionManager;
use Cake\Error\Debugger;
use Cake\Http\Exception\NotFoundException;
$this->disableAutoLayout();
?>
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8" />
<script type="text/javascript" src="http://static.robotwebtools.org/roslibjs/current/roslib.min.js"></script>
<script type="text/javascript" src="https://cdnjs.cloudflare.com/ajax/libs/nipplejs/0.7.3/nipplejs.js"></script>
<?= $this->Html->script('https://static.robotwebtools.org/EaselJS/current/easeljs.js') ?>
<?= $this->Html->script('https://static.robotwebtools.org/EventEmitter2/current/eventemitter2.min.js') ?>
<?= $this->Html->script('ros2d.js') ?>
<?= $this->fetch('script') ?>
<script type="text/javascript" type="text/javascript">
var ros = new ROSLIB.Ros({
url: 'ws://192.168.0.139:9090'
});
ros.on('connection', function() {
document.getElementById("status").innerHTML = "Connected";
});
ros.on('error', function(error) {
document.getElementById("status").innerHTML = "Error";
});
ros.on('close', function() {
document.getElementById("status").innerHTML = "Closed";
});
var txt_listener = new ROSLIB.Topic({
ros: ros,
name: '/cmd_vel',
messageType: 'geometry_msgs/Twist'
});
txt_listener.subscribe(function(m) {
document.getElementById("msg_x").innerHTML = m.linear.x;
document.getElementById("msg_y").innerHTML = m.angular.z;
//move(1, 0);
});
cmd_vel_listener = new ROSLIB.Topic({
ros: ros,
name: "/cmd_vel",
messageType: 'geometry_msgs/Twist'
});
move = function(linear, angular) {
var twist = new ROSLIB.Message({
linear: {
x: linear,
y: 0,
z: 0
},
angular: {
x: 0,
y: 0,
z: angular
}
});
cmd_vel_listener.publish(twist);
}
createJoystick = function() {
var options = {
zone: document.getElementById('zone_joystick'),
threshold: 0.1,
position: {
left: 50 + '%'
},
mode: 'static',
size: 150,
color: '#000000',
};
manager = nipplejs.create(options);
linear_speed = 0;
angular_speed = 0;
manager.on('start', function(event, nipple) {
timer = setInterval(function() {
move(linear_speed, angular_speed);
}, 25);
});
manager.on('move', function(event, nipple) {
max_linear = 0.22; // m/s
max_angular = 2.0; // rad/s
max_distance = 75.0; // pixels;
linear_speed = Math.sin(nipple.angle.radian) * max_linear * nipple.distance / max_distance;
angular_speed = -Math.cos(nipple.angle.radian) * max_angular * nipple.distance / max_distance;
});
manager.on('end', function() {
if (timer) {
clearInterval(timer);
}
self.move(0, 0);
});
}
window.onload = function() {
createJoystick();
init();
}
/**
* Setup all visualization elements when the page is loaded.
*/
function init() {
// Create the main viewer.
var viewer = new ROS2D.Viewer({
divID: 'map',
width: 308,
height: 250
});
// Setup the map client.
var gridClient = new ROS2D.OccupancyGridClient({
ros: ros,
rootObject: viewer.scene
});
// Scale the canvas to fit to the map
gridClient.on('change', function() {
viewer.scaleToDimensions(gridClient.currentGrid.width, gridClient.currentGrid.height);
viewer.shift(gridClient.currentGrid.pose.position.x, gridClient.currentGrid.pose.position.y);
});
}
</script>
</head>
<body >
<h1>Simple ROS User Interface</h1>
<p>Connection status: <span id="status"></span></p>
<p>Last message on X <span id="msg_x"></span></p>
<p>Last message on Y <span id="msg_y"></span></p>
<div id="zone_joystick" style="position: relative;"></div>
<div id="map"></div>
</body>
</html>
- 增加虚拟圆盘控制器
- 增加X,Y速度的显示
- 显示地图,非实时,移动需要刷新,加载新地图
测试:
- 运行gazebo
roslaunch turtlebot3_gazebo turtlebot3_world.launch
- 运行建图
roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=gmapping
- 运行rosbridge_server
roslaunch rosbridge_server rosbridge_websocket.launch
- 打开页面:http://192.168.0.139/pages/slam2d
- 效果如下:
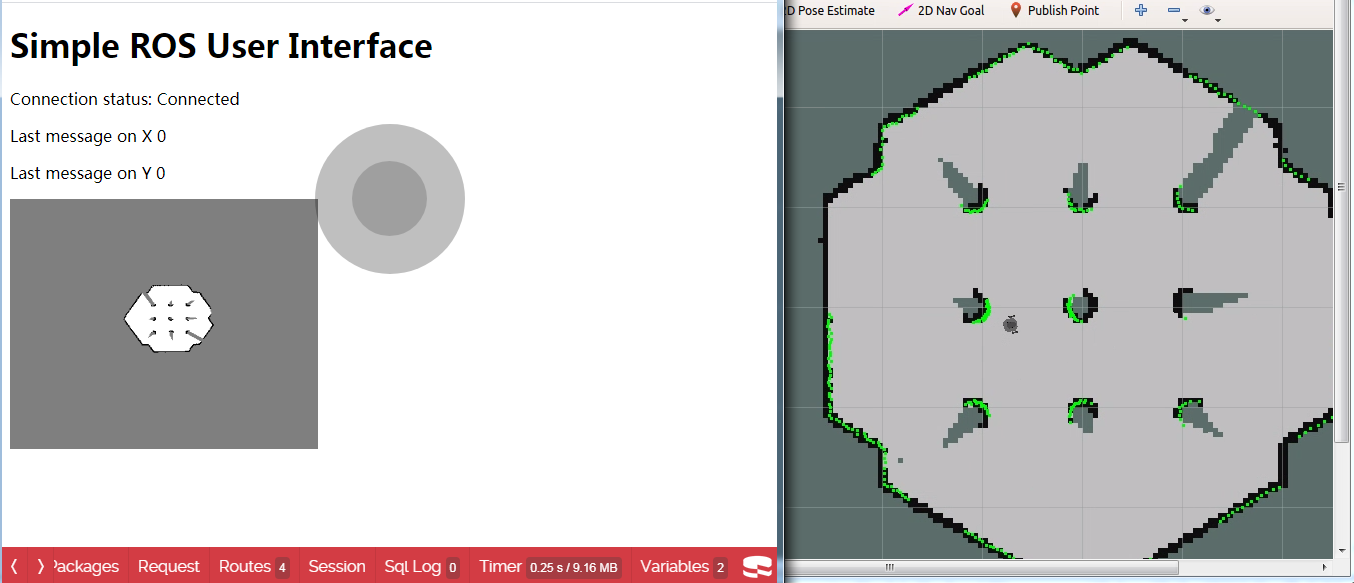
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号