



















ROS与web入门教程-控制turtlesim移动
ROS与web入门教程-控制turtlesim移动
说明:
- 介绍通过页面控制turtlesim移动
步骤:
- 增加新的模板turtlesim.php
cd /home/ubuntu/web/cms/templates/Pages
cp ros.php turtlesim.php
- 更改内容为:
<?php
/**
* CakePHP(tm) : Rapid Development Framework (https://cakephp.org)
* Copyright (c) Cake Software Foundation, Inc. (https://cakefoundation.org)
*
* Licensed under The MIT License
* For full copyright and license information, please see the LICENSE.txt
* Redistributions of files must retain the above copyright notice.
*
* @copyright Copyright (c) Cake Software Foundation, Inc. (https://cakefoundation.org)
* @link https://cakephp.org CakePHP(tm) Project
* @since 0.10.0
* @license https://opensource.org/licenses/mit-license.php MIT License
* @var \App\View\AppView $this
*/
use Cake\Cache\Cache;
use Cake\Core\Configure;
use Cake\Core\Plugin;
use Cake\Datasource\ConnectionManager;
use Cake\Error\Debugger;
use Cake\Http\Exception\NotFoundException;
$this->disableAutoLayout();
?>
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8" />
<?= $this->Html->script('https://static.robotwebtools.org/EventEmitter2/current/eventemitter2.min.js') ?>
<?= $this->Html->script('roslib.js') ?>
<?= $this->fetch('script') ?>
<script>
// Connecting to ROS
// -----------------
var ros = new ROSLIB.Ros();
// If there is an error on the backend, an 'error' emit will be emitted.
ros.on('error', function(error) {
document.getElementById('connecting').style.display = 'none';
document.getElementById('connected').style.display = 'none';
document.getElementById('closed').style.display = 'none';
document.getElementById('error').style.display = 'inline';
console.log(error);
});
// Find out exactly when we made a connection.
ros.on('connection', function() {
console.log('Connection made!');
document.getElementById('connecting').style.display = 'none';
document.getElementById('error').style.display = 'none';
document.getElementById('closed').style.display = 'none';
document.getElementById('connected').style.display = 'inline';
});
ros.on('close', function() {
console.log('Connection closed.');
document.getElementById('connecting').style.display = 'none';
document.getElementById('connected').style.display = 'none';
document.getElementById('closed').style.display = 'inline';
});
// Create a connection to the rosbridge WebSocket server.
ros.connect('ws://192.168.0.139:9090');
// Publishing a Topic
// ------------------
// First, we create a Topic object with details of the topic's name and message type.
var cmdVel = new ROSLIB.Topic({
ros: ros,
name: '/turtle1/cmd_vel',
messageType: 'geometry_msgs/Twist'
});
// Then we create the payload to be published. The object we pass in to ros.Message matches the
// fields defined in the geometry_msgs/Twist.msg definition.
var twist = new ROSLIB.Message({
linear: {
x: 0.1,
y: 0.2,
z: 0.3
},
angular: {
x: -0.1,
y: -0.2,
z: -0.3
}
});
// And finally, publish.
//cmdVel.publish(twist);
//Subscribing to a Topic
//----------------------
// Like when publishing a topic, we first create a Topic object with details of the topic's name
// and message type. Note that we can call publish or subscribe on the same topic object.
var listener = new ROSLIB.Topic({
ros: ros,
name: '/chatter',
messageType: 'std_msgs/String'
});
// Calling a service
// -----------------
// First, we create a Service client with details of the service's name and service type.
var addTwoIntsClient = new ROSLIB.Service({
ros: ros,
name: '/add_two_ints',
serviceType: 'rospy_tutorials/AddTwoInts'
});
// Then we create a Service Request. The object we pass in to ROSLIB.ServiceRequest matches the
// fields defined in the rospy_tutorials AddTwoInts.srv file.
var request = new ROSLIB.ServiceRequest({
a: 1,
b: 2
});
// Finally, we call the /add_two_ints service and get back the results in the callback. The result
// is a ROSLIB.ServiceResponse object.
addTwoIntsClient.callService(request, function(result) {
console.log('Result for service call on ' + addTwoIntsClient.name + ': ' + result.sum);
});
// Advertising a Service
// ---------------------
// The Service object does double duty for both calling and advertising services
var setBoolServer = new ROSLIB.Service({
ros: ros,
name: '/set_bool',
serviceType: 'std_srvs/SetBool'
});
// Use the advertise() method to indicate that we want to provide this service
setBoolServer.advertise(function(request, response) {
console.log('Received service request on ' + setBoolServer.name + ': ' + request.data);
response['success'] = true;
response['message'] = 'Set successfully';
return true;
});
// Setting a param value
// ---------------------
ros.getParams(function(params) {
console.log(params);
});
// First, we create a Param object with the name of the param.
var maxVelX = new ROSLIB.Param({
ros: ros,
name: 'max_vel_y'
});
//Then we set the value of the param, which is sent to the ROS Parameter Server.
maxVelX.set(0.8);
maxVelX.get(function(value) {
console.log('MAX VAL: ' + value);
});
// Getting a param value
// ---------------------
var favoriteColor = new ROSLIB.Param({
ros: ros,
name: 'favorite_color'
});
favoriteColor.set('red');
favoriteColor.get(function(value) {
console.log('My robot\'s favorite color is ' + value);
});
function publish()//在点击”Publish”按钮后发布消息,并对消息进行更改
{
cmdVel.publish(twist);//发布twist消息
twist.linear.x = twist.linear.x + 0.1;
twist.linear.y = twist.linear.y + 0.1;
twist.linear.z = twist.linear.z + 0.1;
twist.angular.x = twist.angular.x + 0.1;
twist.angular.y = twist.angular.y + 0.1;
twist.angular.z = twist.angular.z + 0.1;
}
function subscribe()//在点击”Subscribe”按钮后订阅'/chatter'的消息,并将其显示到网页中
{
listener.subscribe(function(message) {
console.log('Received message on ' + listener.name + ': ' + message.data);
document.getElementById("output").innerHTML = ('Received message on ' + listener.name + ': ' + message.data);
});
}
function unsubscribe()//在点击”Unsubscribe”按钮后取消订阅'/chatter'的消息
{
// If desired, we can unsubscribe from the topic as well.
listener.unsubscribe();
}
</script>
</head>
<body>
<h1>Simple roslib Example</h1>
<p>Run the following commands in the terminal then refresh this page. Check the JavaScript console for the output.
</p>
<ol>
<li><tt>roscore</tt></li>
<li><tt>rostopic pub /listener std_msgs/String "Hello, World"</tt></li>
<li><tt>rostopic echo /cmd_vel</tt></li>
<li><tt>rosrun rospy_tutorials add_two_ints_server</tt></li>
<li><tt>roslaunch rosbridge_server rosbridge_websocket.launch</tt></li>
</ol>
<div id="statusIndicator">
<p id="connecting">
Connecting to rosbridge...
</p>
<p id="connected" style="color:#00D600; display:none">
Connected
</p>
<p id="error" style="color:#FF0000; display:none">
Error in the backend!
</p>
<p id="closed" style="display:none">
Connection closed.
</p>
</div>
<p id = "output"></p>
<button onclick = "publish()">Publish</button>
<button onclick = "subscribe()">Subscribe</button>
<button onclick = "unsubscribe()">Unsubscribe</button><br />
</body>
</html>
- 增加了按钮pulish,发送速度命令给话题
- 增加了按钮subscribe,监听chatter话题,并输出到页面和输出到console
- 增加了按钮unsubscribe,取消监听
测试:
- 运行rosbridge_server
roslaunch rosbridge_server rosbridge_websocket.launch
- 运行turtlesim
rosrun turtlesim turtlesim_node
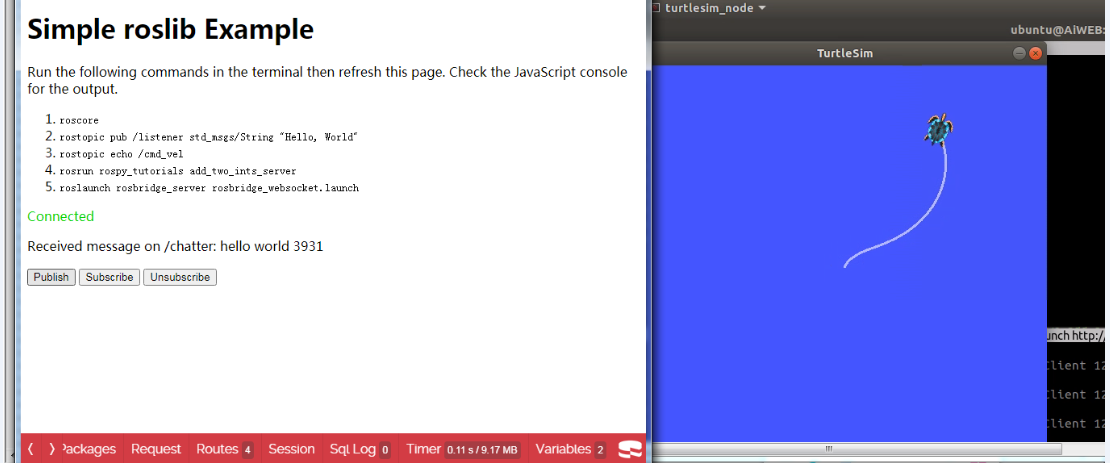
- 打开页面 http://192.168.0.139/pages/turtlesim
- 点击pushlish按钮,小乌龟开始移动
- 效果如下:
- 运行talker程序
rosrun roscpp_tutorials talker
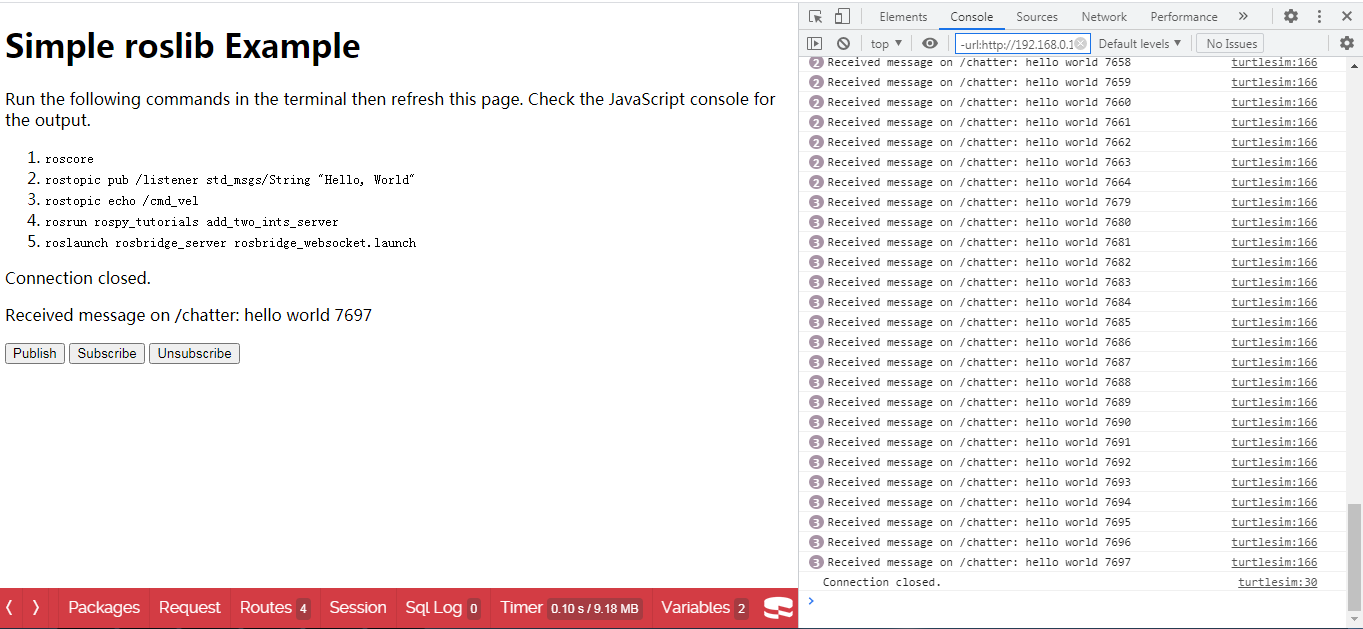
- 点击subscribe按钮,页面显示订阅的话题内容,console上也显示话题内容
- 效果如下:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号