



















LOCO定位系统入门教程-uwb的多种定位模式
说明:
loco positioning系统可以配置为两种模式。双向测距(TWR)模式和到达时差(TDoA)模式
在TWR模式下,设置过程更加简单;如果您打算在TDoA模式下使用系统,我们也建议您也使用此模式,因为在设置之后很容易切换到TDoA。
介绍使用TWR模式的过程,最后介绍了如何切换到TDoA模式。
TWR模式
在这种模式下,标签按顺序 ping 锚点,这使得它可以测量标签和锚点之间的距离。使用此信息,理论上至少需要 4 个锚点来计算标签的 3D 位置,但更实际的数字是 6,以增加冗余和准确性。此模式是最准确的模式,并且当标签或四边形离开锚点界定的空间时也适用。标签以时隙方式主动与锚点通信,在这种模式下,只能定位一个标签或四边形,最多可定位 8 个锚点。TDoA 2 模式
在TDoA 2模式下,锚点系统连续发送同步数据包。监听这些数据包的标签可以通过测量数据包到达的时间差来计算到两个锚点的相对距离。根据 TDoA 信息,可以计算空间中的 3D 位置。在此模式下,标签仅被动监听,因此新标签不会向系统添加任何负载,从而可以同时定位任意数量的标签或四边形。这使其成为集群的完美模式。与 TWR 相比,TDoA 2 在定位工作的空间方面更具限制性,理想情况下标签应位于或非常接近锚定系统界定的空间。这意味着 TDoA 2 在飞行空间角落放置 8 个锚点时效果最佳。在此空间中,准确度和精确度可与 TWR 相媲美。
在这种模式下,锚点系统是时隙化和同步的,并且锚点的数量限制为 8 个。
TDoA 3 模式
TDoA 3 模式与 TDoA 2 有许多相似之处,并且支持任意数量的标签或四元组。主要区别在于 TDoA 2 的时隙方案已被随机传输调度所取代,这使得添加更多锚点成为可能。通过添加更多锚点,系统可以扩展到更大的空间或跨越多个房间,而无需所有锚点之间的视线。它还使其更加稳健,并且可以动态处理锚点的丢失或添加。与 TDoA 2 相比,此模式下的估计位置噪声可能稍微大一些。
步骤:
如果您打算在TDoA模式下使用系统来飞行多个Crazyflie,现在该更改系统模式了。存在两种版本的TDoA测距协议
TDoA 2与8个锚点一起使用
TDoA 3更强大,并且对锚点的数量没有任何限制,因此可以用于更大的系统。与TDoA2相比,估计的位置可能稍微有点吵
强制Crazyflie使用TWR模式
在“疯狂状态”部分中,选中“ TWR”单选按钮
这将启用锚点状态部分中的“ TDoA2”和“ TDoA3”按钮
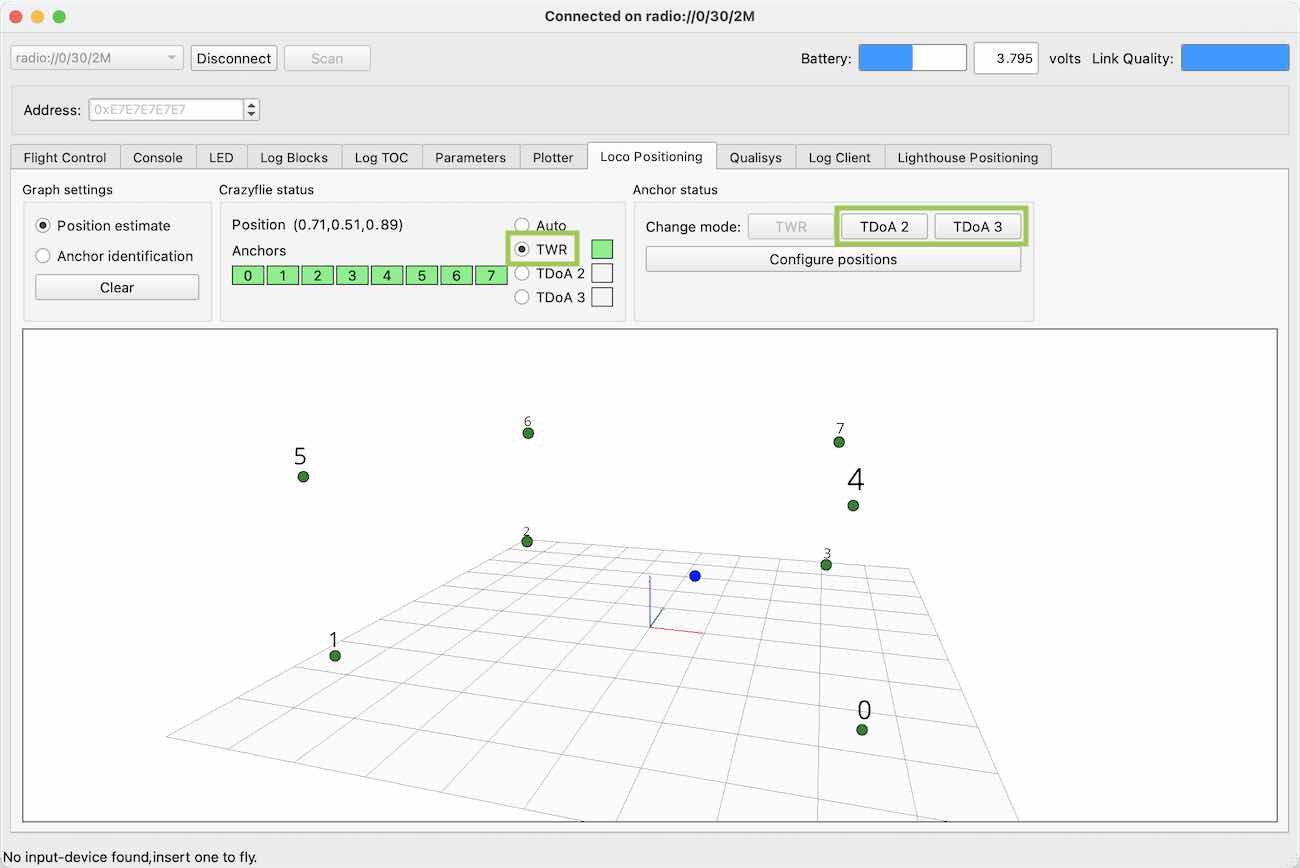
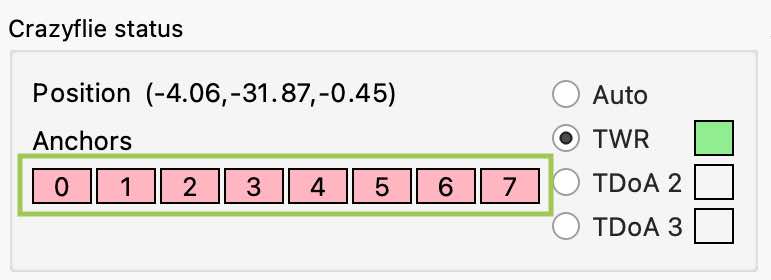
将锚点切换到TDoA模式
单击“ TDoA 2”或“ TDoA 3”按钮将锚点切换到TDoA模式之一。
几秒钟后,所有锚点状态框应变为红色,以指示Crazyflie 2.X不再从锚点接收TWR数据
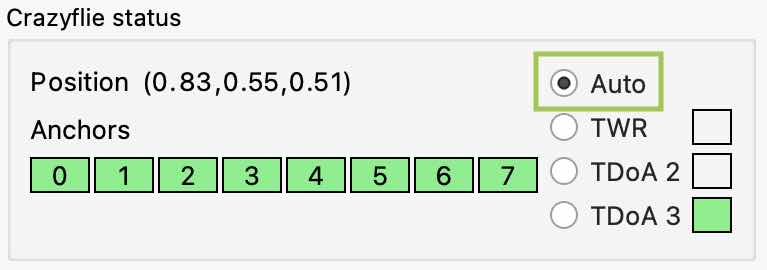
将Crazyflie切换回自动模式
最后一步,在Crazyflie状态部分中勾选“自动”单选按钮,以确认TDoA模式,并验证TDoA2框是否变为绿色。
当Crazyflie切换到TDoA模式并开始从锚点接收数据时,锚点框也应变为绿色
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号