



















LOCO定位系统入门教程-硬件介绍
说明:
- 介绍Crazyflie的硬件
相关设备:
- crazyflie套件:采购地址
crazyflie无人机硬件:
STM32F405:主微控制器,用于状态估计、控制和扩展的处理(Cortex-M4,168 MHz,192 kB SRAM,1 MB闪存)
nRF51822:无线电和电源管理微控制器(Cortex-M0,32 MHz,16 kB SRAM,128 kB闪存)
MPU-9250:9轴惯性测量单元
LPS25H:压力传感器
8kB EEPROM
uUSB:充电和有线通信
扩展端口(I2C、UART、SPI、GPIO)
STM32的调试端口。可选的调试工具包可用于转换为标准JTAG连接器,并调试nRF51
定位节点模块Loco positioning node硬件:
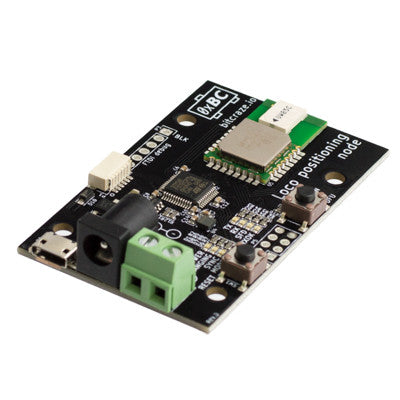
支持 Anchor 和 Sniffer 模式,以及有限的 TWR Tag 模式(无位置估计)
可用作独立系统,其中一些节点充当锚点,一个节点充当报告到锚点的距离的标签
多种供电选项
板载MCU
Loco定位扩展甲板Loco Positioning expansion deck

基于Decawave DWM1000模块
实施 IEEE 802.15.4 UWB
用于自动扩展卡检测的 1 线存储器
最大消耗 150 mA,取决于操作模式和配置
Crazyflie 2.X 带甲板飞行时间 6 分钟
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号