



















Crazyflie入门教程-定位-Loco定位系统入门
说明:
loco positioning系统可以配置为两种模式。双向测距(TWR)模式和到达时差(TDoA)模式
在TWR模式下,设置过程更加简单;如果您打算在TDoA模式下使用系统,我们也建议您也使用此模式,因为在设置之后很容易切换到TDoA。
介绍使用TWR模式的过程,最后介绍了如何切换到TDoA模式。
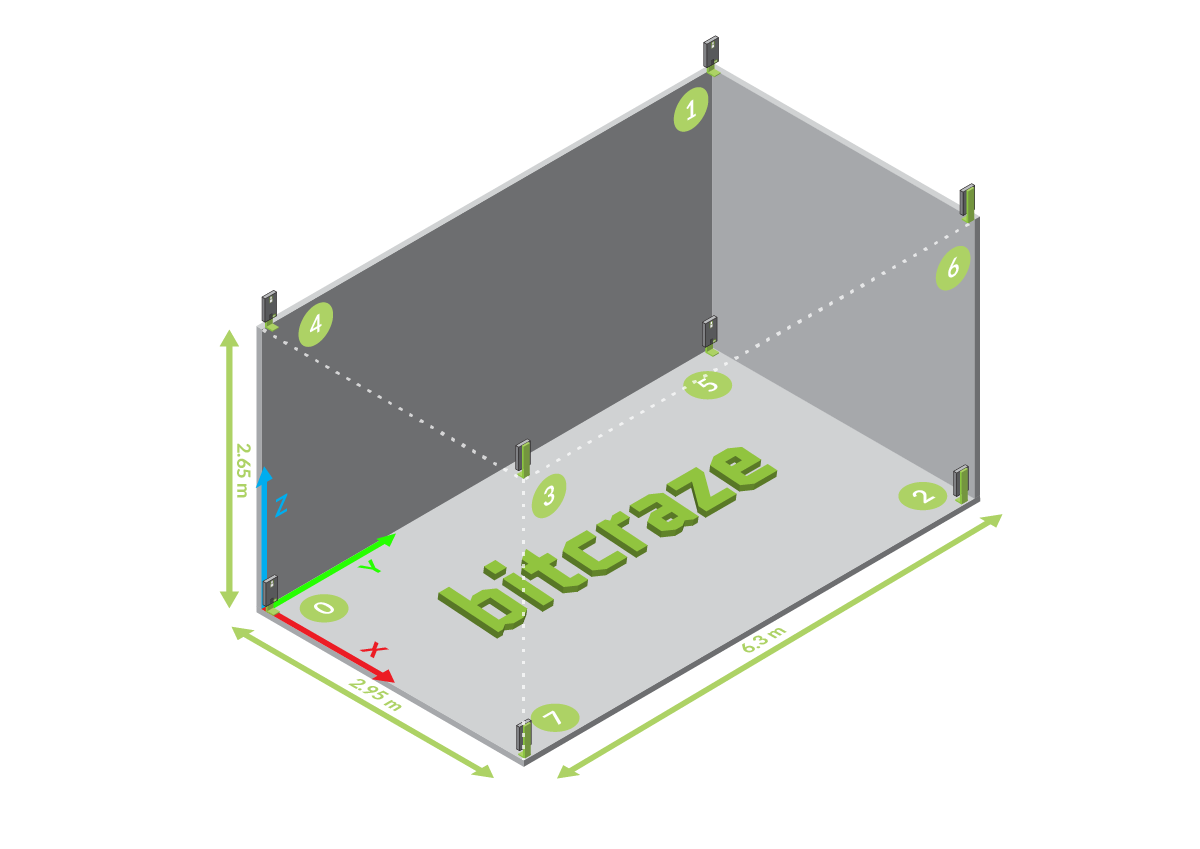
为了说明锚点的位置,我们记录了两个参考系统,一个带有6个锚点,一个带有8个锚点。6个锚点设置主要用于TWR,而我们建议TDoA模式使用8个锚点
相关设备:
- crazyflie套件:采购地址
组装loco系统DWM1000 uwb套件:
步骤:
准备锚点,在设置系统之前,您需要更新固件并配置节点
下载LPS配置工具 lps-tools-win32-install-2018.10.exe,点击下载
下载LPS节点固件 lps-node-firmware-2022.09.dfu,点击下载
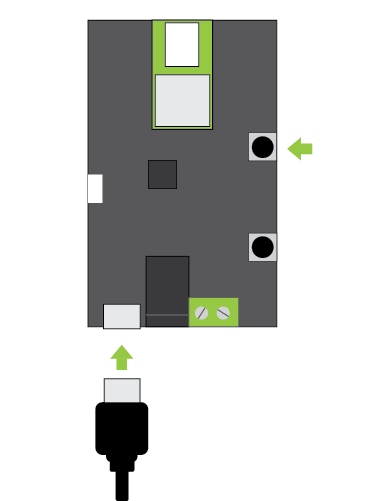
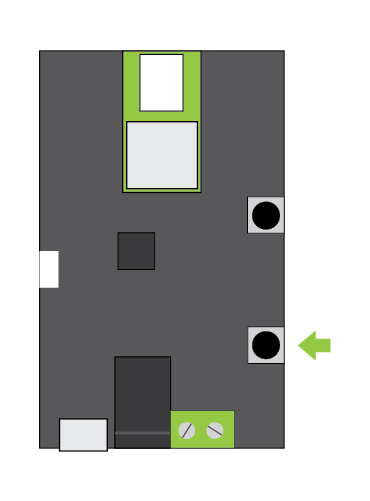
要更新节点,请先打开LPS配置工具。通过USB连接到计算机时,请按住节点上的DFU按钮。这将以DFU模式启动节点
如果您使用的是Windows,则该节点将不会在第一时间被识别。您需要按照说明使用Zadig安装其USB驱动程序。在DFU模式下,该节点将在Zadig中显示为“ STM32 BOOTLOADER”
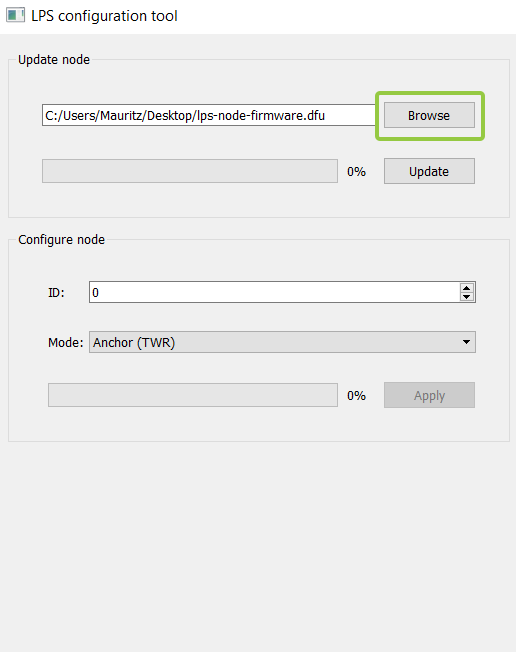
- 单击浏览并选择LPS节点固件
- 现在更新节点
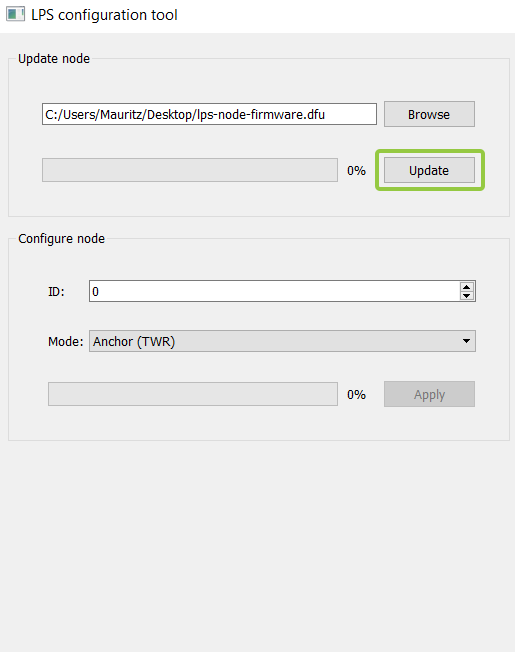
- 更新完成后,按重置
断开节点与USB的连接,并对所有节点重复相同的步骤,然后再进行配置
为节点设置模式,将其转换为锚,并为每个锚设置单独的ID。锚点应从0开始向上编号
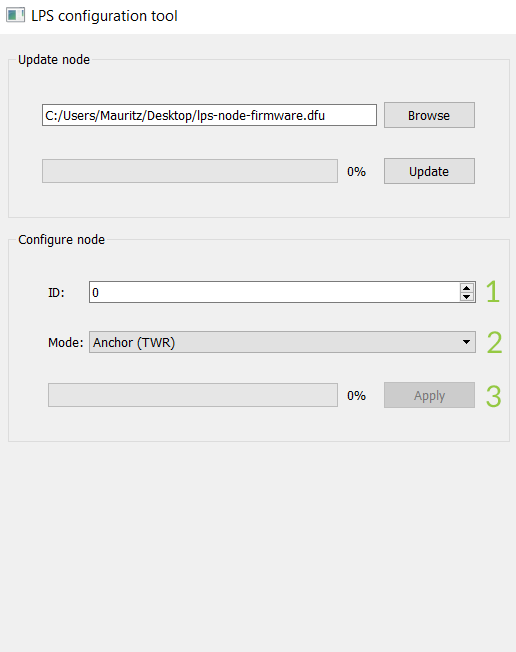
- 将第一个锚连接到USB(无需按任何按钮)
- 选择一个合适的ID
- 选择“锚定(TWR)”模式
- 单击“应用”将设置写入锚点
- 对所有锚点重复该过程
将锚放置在房间中
为了获得良好的结果,锚的放置有一些经验法则
锚应均匀分布在飞行体积周围,并且至少相距2m
锚点应与飞线的位置成一直线
锚定天线应放置在距离任何墙壁,天花板或金属物体15cm的位置,以避免干扰反射。在我们的参考设置中,我们通过使用这些3D打印支架来完成此操作 。在存储库中,单击“原始”,然后选择“另存为”,然后将文件另存为stl文件
在我们的8个锚参考设置中,我们将节点放置在盒子的角上,因为TDoA的位置估计在凸包内效果最好。ID的顺序对于TDoA2很重要,但对于TDoA3则可以忽略
如果您有8个以上的锚点,建议您先设置一个包含8个锚点的系统,然后再将系统切换到TDoA3,以向该系统添加更多的锚点
给锚点供电,可以通过三种不同的方式为锚提供动力
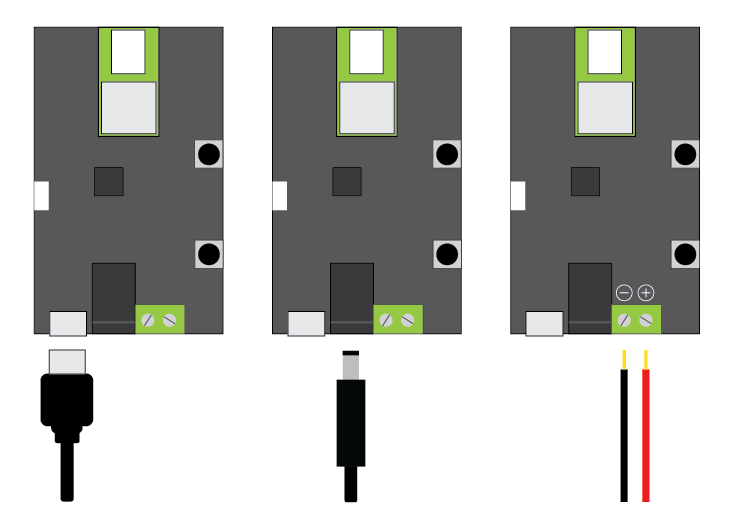
微型USB。如果使用外部电池或电源适配器,则适合固定和便携式设置
桶式千斤顶。使用电源适配器时,适合固定和便携式设置
螺丝端子。适合固定安装和链接。电缆尺寸最大为0.5mm2
它们可以同时连接,因此当连接微型USB电缆进行更新或更改配置时,锚点仍可通过螺钉端子供电。所有电源选项均可以承受5-12V的电压,并且电源应至少能够提供150mA的电流
现在,当一切都安装完毕并启动电源后,就可以配置系统了,这是通过Crazyflie客户端完成的。客户端和锚点之间的通信通过Crazyflie和LPS平台进行中继
将您的Crazyflie 2.X放在飞行区域的中央
打开CF客户端并连接到Crazyflie 2.X
如果尚未完成,请 在2Mbit无线电模式下配置Crazyflie2.X 。这样可以减少对UWB无线电的干扰。如果更改了配置,则需要重新启动Crazyflie2.X
- 需要在菜单“View”->“Tabs”->“Loco Positioning”标签中选中它才能使其可见。
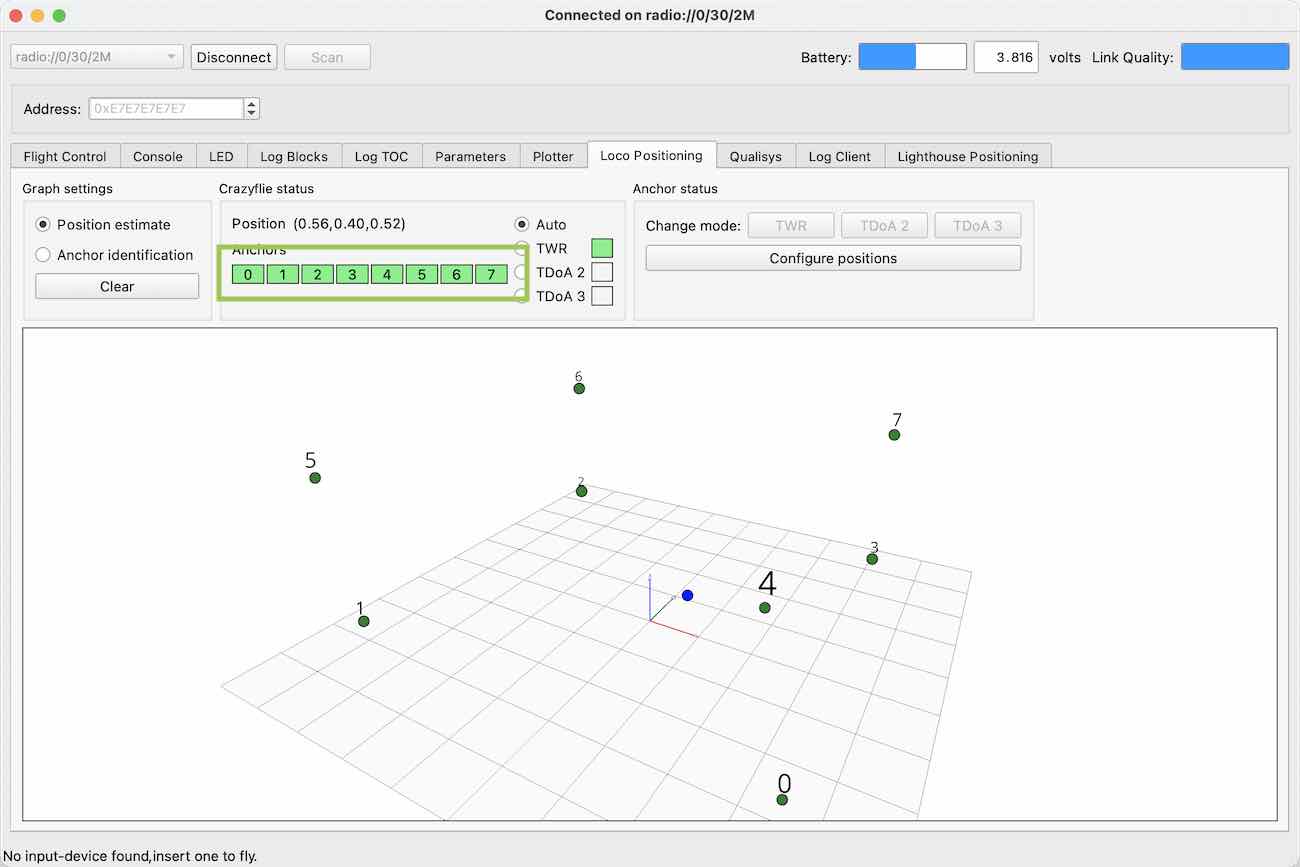
在“锚定范围”状态框中,检查是否有与锚定一样多的绿色框
红色框表示Crazyflie 2.X无法与该锚点通信,也无法获取任何测距数据。在这种情况下,请确认锚点配置正确,通电且在视线范围内
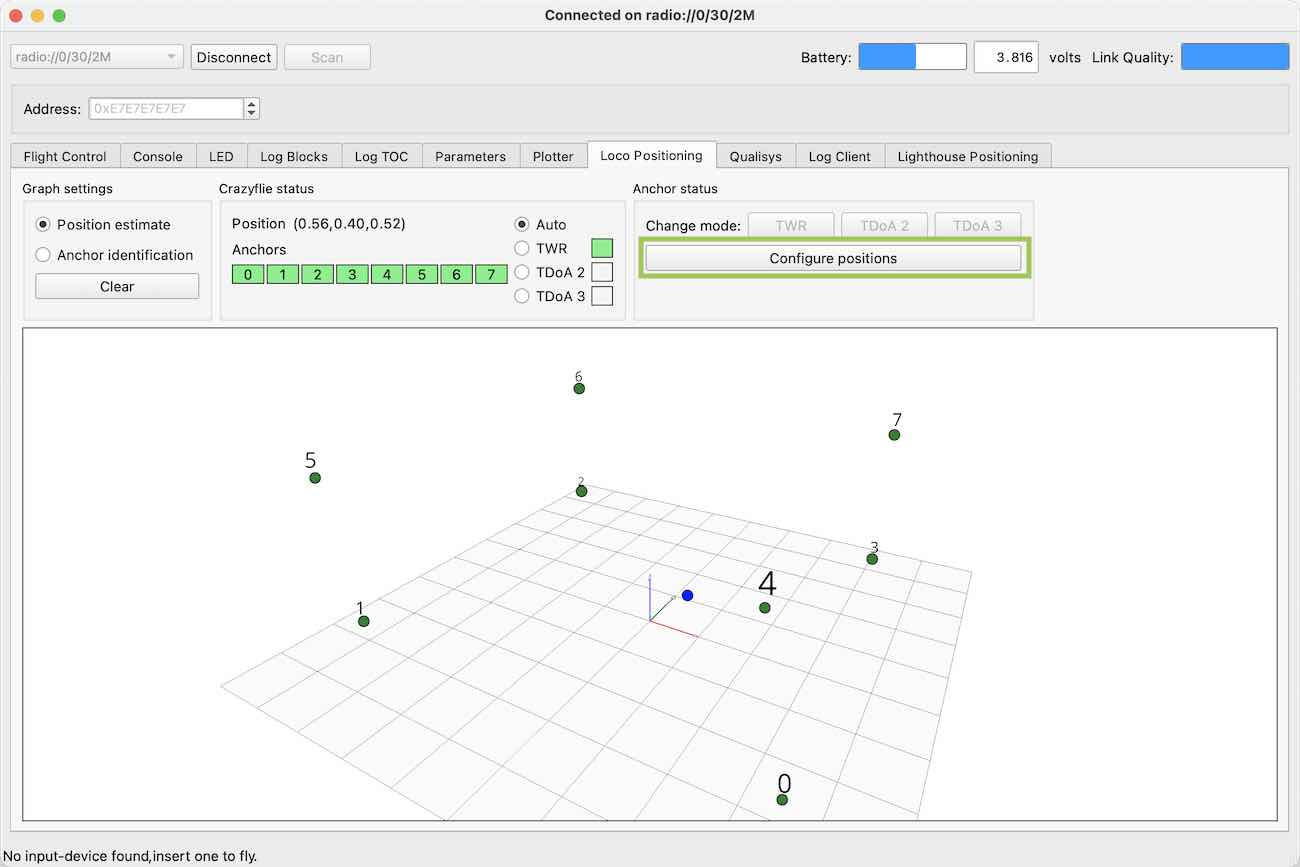
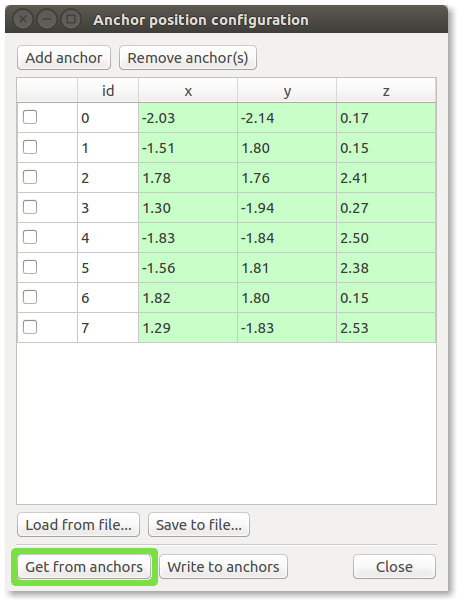
- 要开始配置锚点位置,您需要单击“Configure positions”按钮
- 将会出现一个弹出窗口。单击按钮“Get from anchors”以获取锚点列表,并使用当前存储在锚点中的值填充位置
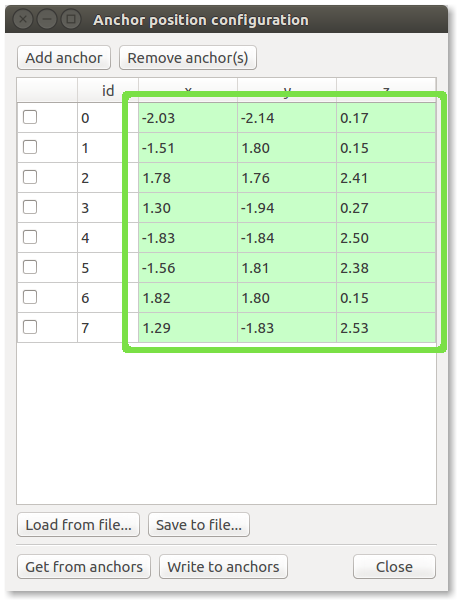
输入系统中锚点的位置(坐标)。注意:以米为单位。
输入新值时,该框会变成红色,表示它与锚中存储的当前值不同
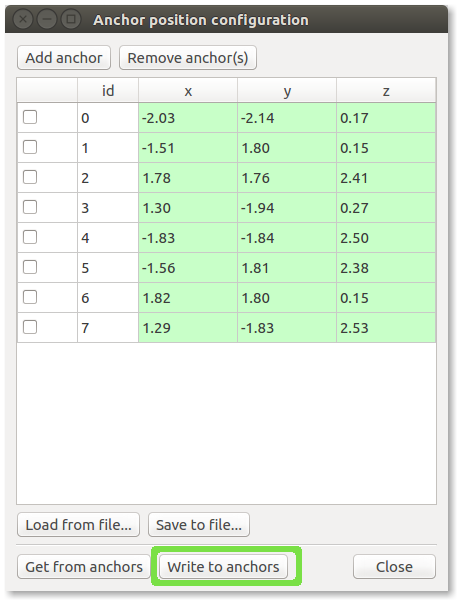
要将新的锚点位置保存在锚点中,请按“Write to anchors”按钮
验证锚点位置框是否从红色变为绿色,这表示新位置已被写入锚点,而红色已被写回到客户端。回读过程最多可能需要5秒钟,请耐心等待。如果5到10秒后未发生任何变化,则可能不是所有锚都可以进行写入,请通过单击“Write to anchors”按钮尝试再次写入。
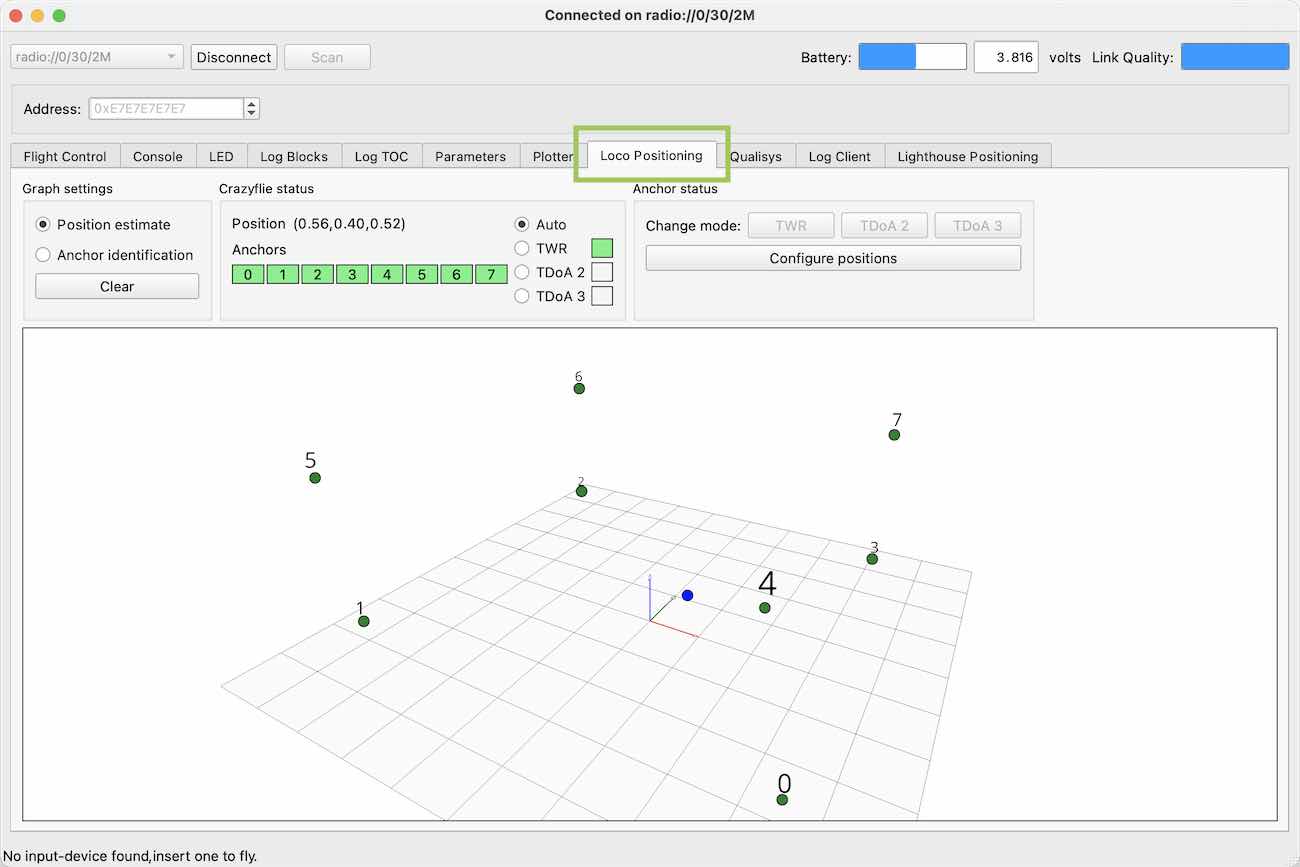
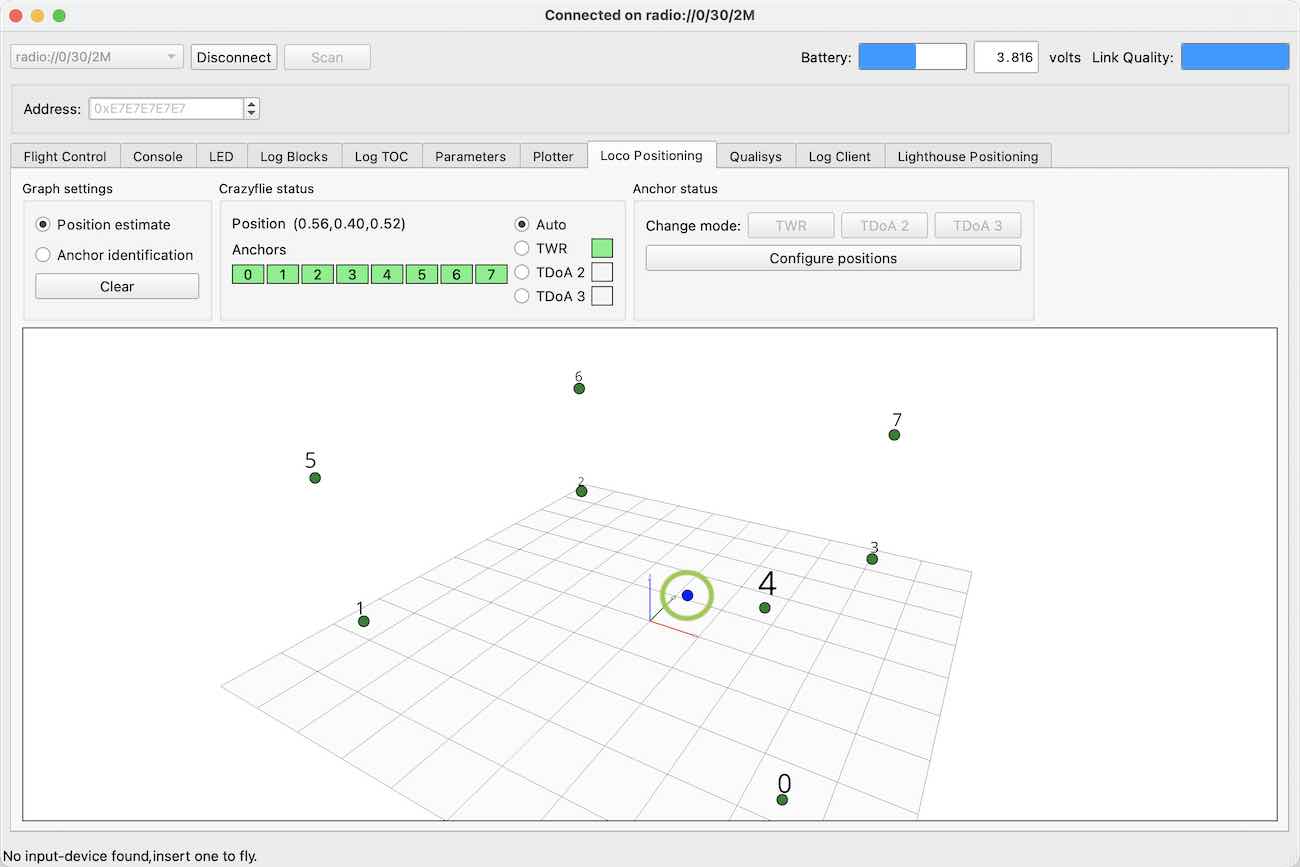
验证锚的位置有助于排除以后的定位问题。3D图形显示了Crazyflie的锚点和位置。红线表示X轴,绿色表示Y轴,蓝色表示Z轴。可以使用鼠标旋转,移动和缩放图形
- 将图形设置模式切换为“锚点识别”
- 将Crazyflie移动到靠近一个锚点的位置
- 验证图中是否显示了正确的锚点
- 对所有锚点重复此过程,并更正所有错误配置的锚点地址
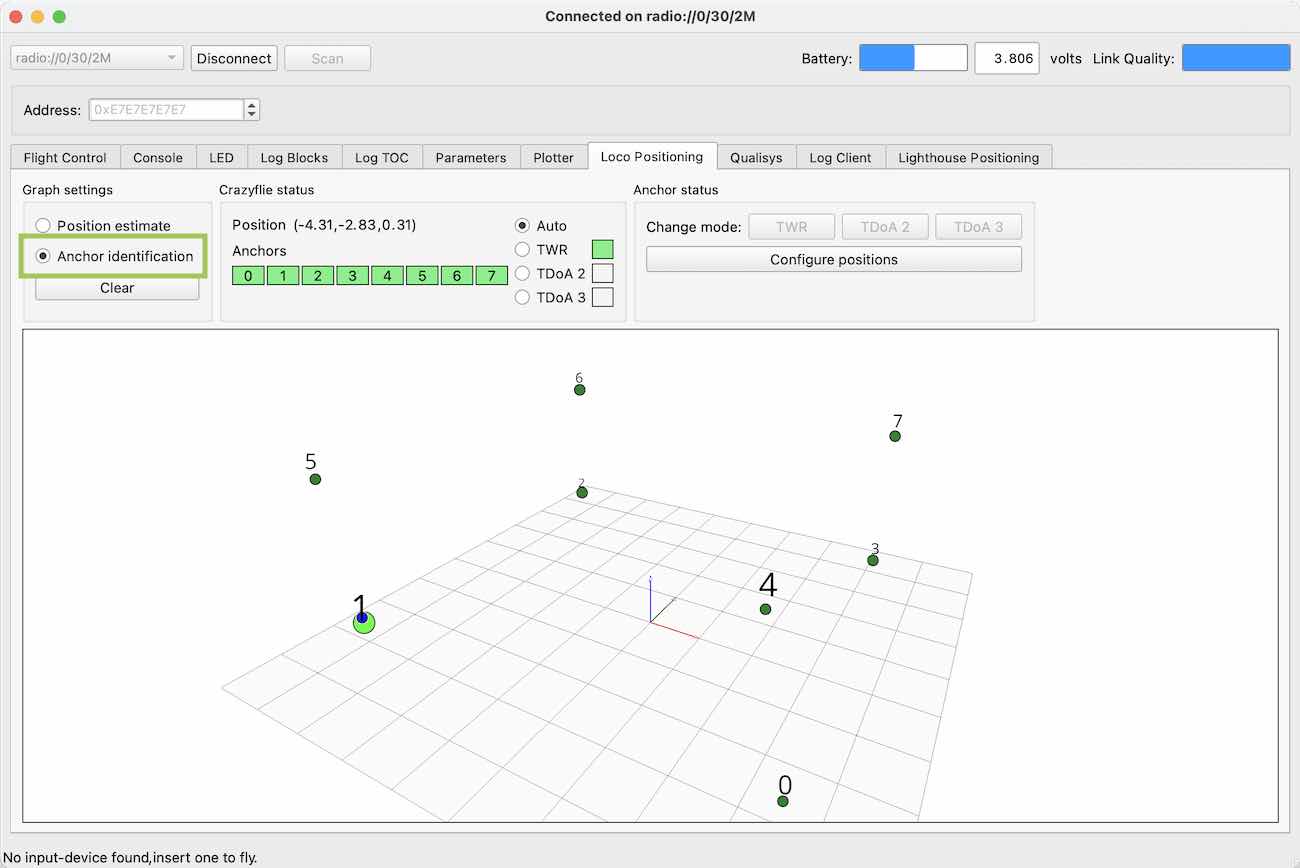
- 将图形设置模式切换回“位置估计”
-移动CF并验证图中的移动是否与物理移动相对应
校准完成
如果您打算在TDoA模式下使用系统来飞行多个Crazyflie,现在该更改系统模式了。存在两种版本的TDoA测距协议
TDoA 2与8个锚点一起使用
TDoA 3更强大,并且对锚点的数量没有任何限制,因此可以用于更大的系统。与TDoA2相比,估计的位置可能稍微有点吵
强制Crazyflie使用TWR模式
在“疯狂状态”部分中,选中“ TWR”单选按钮
这将启用锚点状态部分中的“ TDoA2”和“ TDoA3”按钮
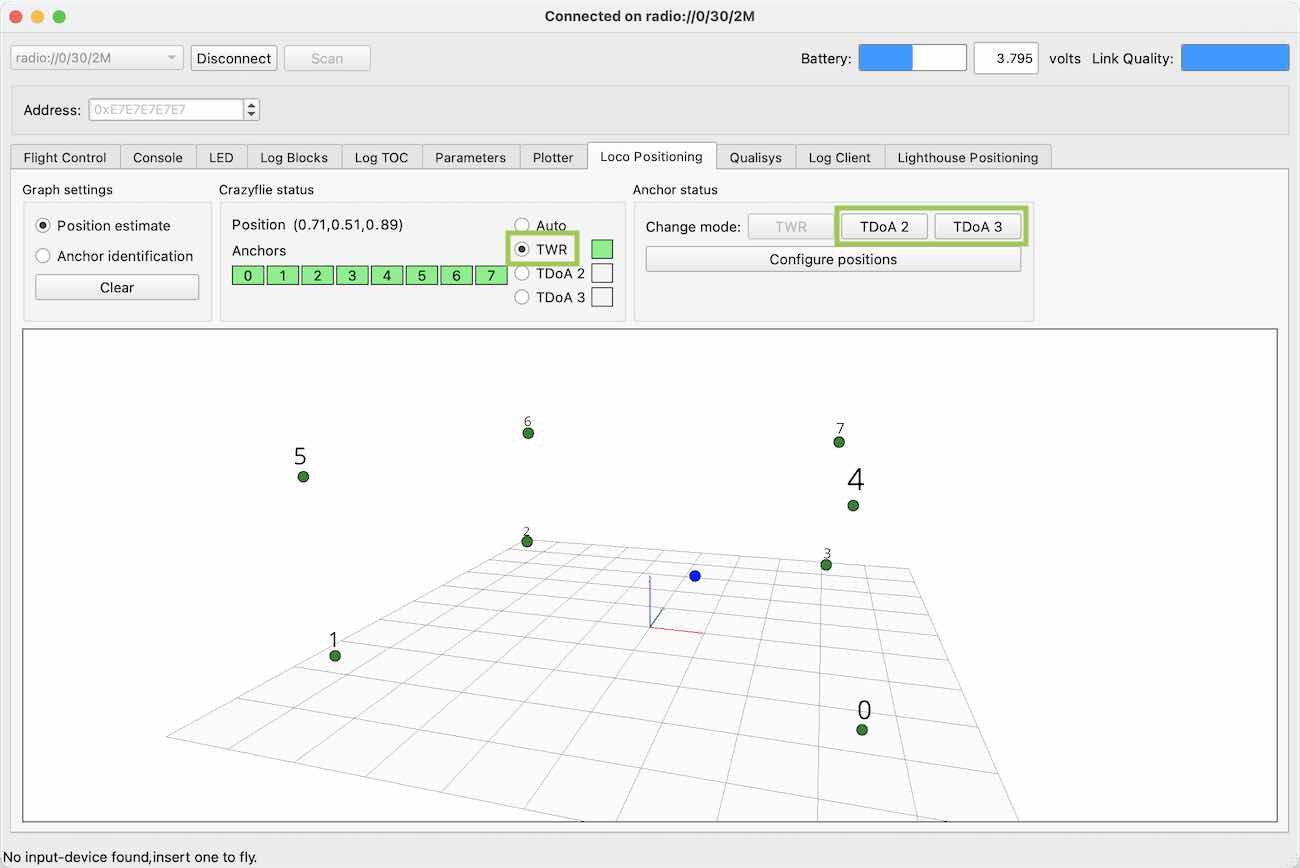
将锚点切换到TDoA模式
单击“ TDoA 2”或“ TDoA 3”按钮将锚点切换到TDoA模式之一。
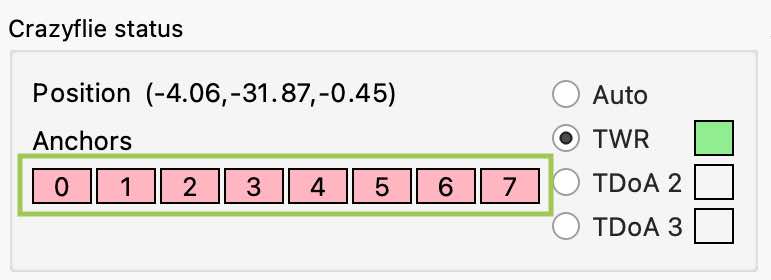
几秒钟后,所有锚点状态框应变为红色,以指示Crazyflie 2.X不再从锚点接收TWR数据
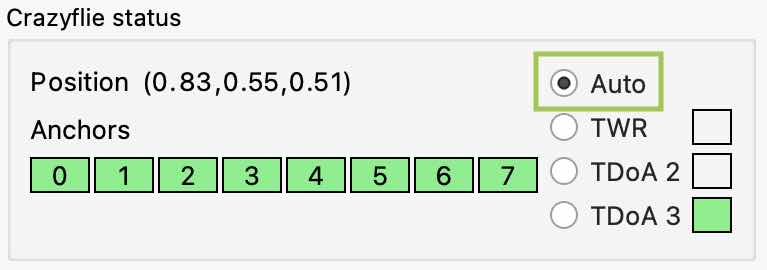
将Crazyflie切换回自动模式
最后一步,在Crazyflie状态部分中勾选“自动”单选按钮,以确认TDoA模式,并验证TDoA2框是否变为绿色。
当Crazyflie切换到TDoA模式并开始从锚点接收数据时,锚点框也应变为绿色
演示视频
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号