



















四旋翼那些事-05.飞控姿态控制台架试验(Yaw)
四旋翼那些事-05.飞控姿态控制台架试验(Yaw)
说明:
- 本教程主要讲Yaw控制的台架测试
飞控姿态控制台架试验(Yaw)

- 上图为Yaw角测试台架。相对roll、pitch测试,Yaw的测试更为容易,所以也没专门为Yaw角测试整一个专业 的台架
- 刚好手里有一个伺服电机做的圆盘,就地取材,将就着做了个简单测试。(整个测试时间不超过十分钟就搞定了。)
下图中,为一伺服电机,电机固定在一个 长方形的板子上
电机轴上安装一个圆盘,圆盘可以绕电机轴自由旋转

- 这里做测试并 没有用到电机,只用到了电机的旋转轴和这个圆盘而已。下图黑色的是伺服电机。

- 将四旋翼捆绑在圆盘上。轻轻拨动一下机架,基本上可以自由无阻碍的旋转

- 下面开始实际测试
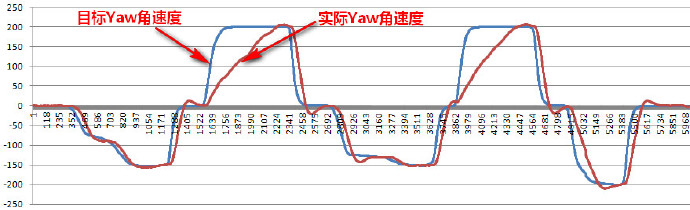
- 测试最大跟踪角速为200°/s。从上图 情况来看,反向目标角速度跟踪比较好,正向跟踪较为缓慢。具体原因在下图中给出了解释
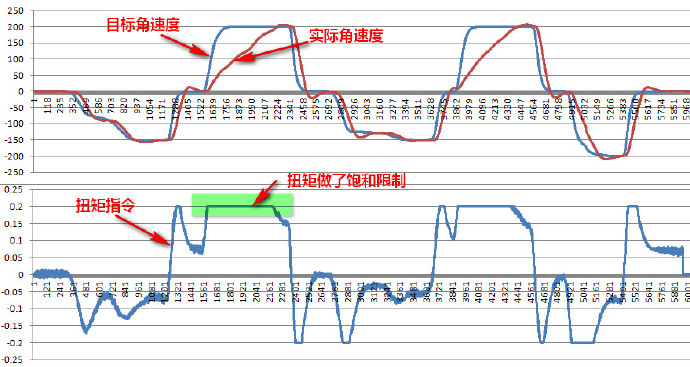
上图Yaw角速度调节扭矩进行了饱和限幅处理
正向运转跟踪速度慢,是因为达到了我人为设定的一个扭矩限制值
而反向运转未达到这个饱和限制值。这就是为什么正向运转跟踪速度慢,而反向运转跟踪良好
那么是什么导致了正向反向特性不一样的呢?这是因为这个旋转台带来的正反向阻尼特性不一样造成的,下图曲线给 出了进一步解释
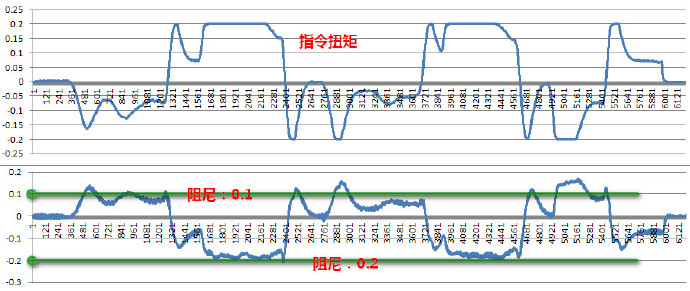
- 一个阻尼:0.1,一个阻尼:0.2。而实际在空中的时候Yaw角一般不会表现出 这样的不对称特性
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号