



















四旋翼那些事-03.飞控减振实验
四旋翼那些事-03.飞控减振实验
说明:
- 本教程介绍针对飞控Z轴振动进行的飞控减振实验
飞控减振实验

前段时间,在做飞行控制实验时,发现飞控数据非常不理想
后来发现飞控Z轴振动非常厉害,特此专门对飞控振动环境(减振)做了一系列实验,特记于此
此实验由WalkAnt和A'bel共同完成
验机型如上图所示,为四轴飞行器,详细参数如下:
|
机架 |
450红白机架 |
|
电调 |
好盈乐天40A |
|
电机 |
朗宇x2212,KV980 |
|
桨 |
1047 |
|
电池 |
3S 2000mAh |
|
飞控硬件 |
Pixhawk |
|
遥控器 |
华科尔D10 |
|
数传 |
3DR radio |
- 仅减振床情形

情形1:将飞控(Pixhawk)直接安装在减振床(如上图)上。
Pixhawk大约38克,在仅仅加减振床的情形下,测得的Z轴加速度(原始采样值)曲线如下:
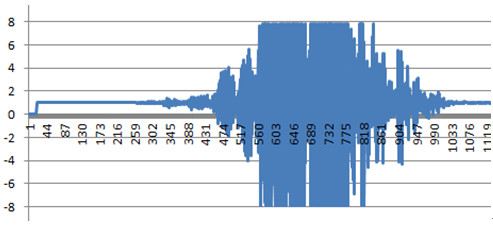
可以看到振动已经超出8g量程范围,这导致加速度测量严重失真
需要说明的是,这个数据是加速计原始数据,没有经过任何滤波,不像Pixhawk地面站(Mission Planner)中观测到的是经过滤波后的加速计数据
MissionPlanner中的加速计数据是在1000hz采样下经过15hz二阶滤波的结果,用该数据调试减振,数据不充分,请各位注意分辨。
注:本文数据均是以200hz采样频率得到;加速度计量程为正负8g
- 减振床+铜板情形
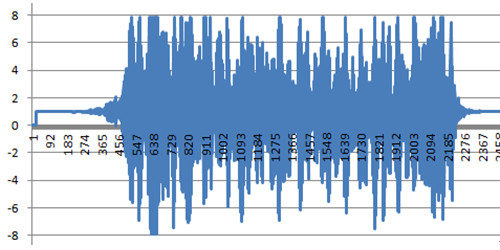
情形2:在减振床上方增加一块70克铜板,再将飞控固定于铜板上
测得的Z轴加速度原始值已经降为8g以下,少量数据超出8g,如下图所示
- 减振床+铜板+海绵情形
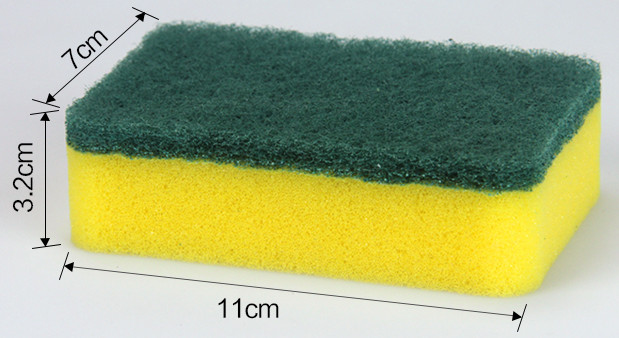
情形3:减震床上加铜板(70克),铜板上再加海绵
海绵其实就是洗完用的海绵(如下图),为了做实验不管啦。实验时,对海绵进行了一些裁剪
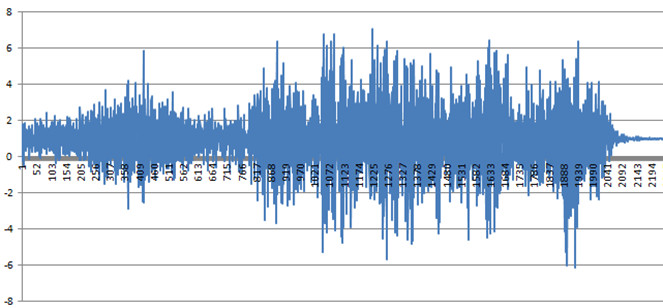
- 减振床、铜板再另加海绵,发现Z轴原始加速计值已经基本降低到了到正负5g以下。因为海绵高度较高,这导致了X、Y轴加速计振动值变得更加恶劣。(上图为Z轴加速计值,下图为Y轴加速计值)
- 可以看到,Z轴有明显改善的情况下,Y轴却突然已经飙升到了3~4g了。原因是海绵太高,所以自然难免会摇来晃去
- 减振床+铜板+泡沫胶情形
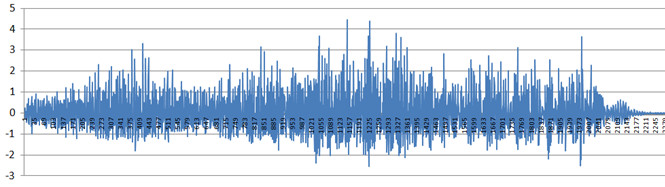
当然这之后又做了不少实验,最后功夫不负有心人,经过多次改良,总算设计出一种非常好的减振结构:采用减震床+铜板+泡沫胶
下面给出减振曲线,原始值如下:
- 滤波后的值如下:
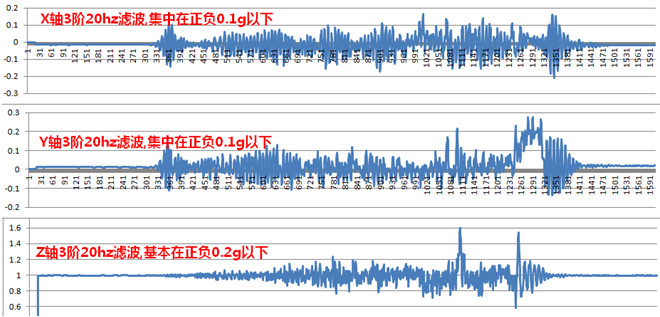
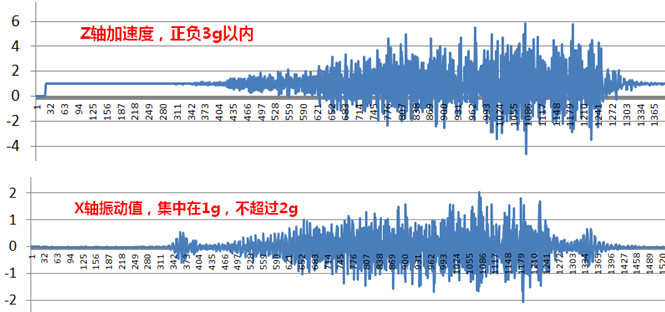
可以看到:
- Z轴加速计原始值已经控制在正负3g以内,滤波后振动信号幅度进一步减小至正负0.2g以内
- X、Y轴加速计原始值集中在正负1g以下,滤波后更是在正负0.1g以内
此实验所用到的泡沫双面胶如下图所示:

粘贴方式为:
1、将减震床固定在飞行机架上;
2、在减震床上固定70克铜板;
3、在长方形铜板四个角上各粘贴一片15mm*15mm的泡沫双面胶;
4、将飞控放置于泡沫双面胶上固定。以上是我测试的结果,各位也可以用3M胶进行测试,这样的固定会更加牢靠。
综合上面的测试,得到的主要经验是:飞控太轻(38克),像“减震床”这样的东西,飞控都觉得太硬了。所以减振的原则就是:第一,必须给飞控增重;第二,必须给减震床增加额外的弹性
1、给飞控增重,就是增加铜块,以增加飞控的整体惯性,起到“硬”滤波效果
2、增加所谓的泡沫双面胶(四个角上,各贴一小片),为的就是增加更多的弹性,更好的隔绝振动当然还有很多因素会影响的飞控的振动环境,比如机架是否牢靠,电机质量如何(转动稳不稳),螺旋桨是否做过动平衡等等,这些因素也比较关键,这次实验没有在这些地方做文章
关于70克铜板,有朋友会觉得太重啦!要追求一个非常好的减振效果,这样的牺牲也许是非常值得的!
当然,也有一些公司的加速度计、陀螺仪单元(IMU单元)是单独做成了小盒子的,他们在IMU盒子里面做了许多减振的工作,这样直接安装到机架上就可以了。不至于像我这样,下血本
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号