



















Pixhawk源码笔记-06.源码预览与APM:Copter程序库
Pixhawk源码笔记-06.源码预览与APM:Copter程序库
说明:
- 本教程将对APM 源码调用做一个简要介绍
第七部分 源代码预览与APM:Copter程序库
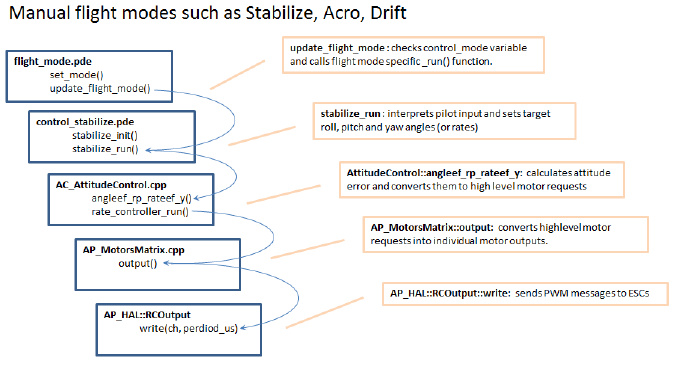
APM::Copter代码主要放在ArduCopter文件夹中,并且和ArduPlane和ArduRover使用同样的库文件下面这张图展示了从飞行模式到电机输出的调用关系:

APM:Copter程序库
参考资料:
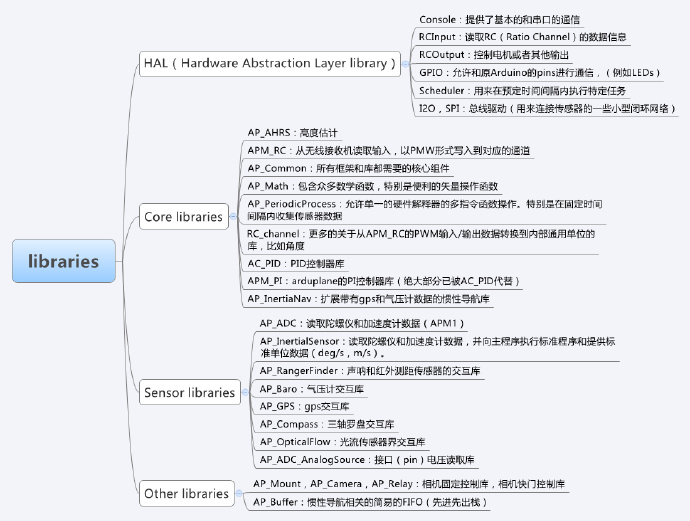
- 这些库文件也同样被ArduPlane和ArduRover所使用。下面将列出一系列高层次的库的说明和它们的函数说明
- 核心库
- AP_AHRS:采用DCM(方向余弦矩阵方法)或EKF(扩展卡尔曼滤波方法)预估飞行器姿态。
- AP_Common:所有执行文件(sketch格式,arduino IDE的文件)和其他库都需要的基础核心库。
- AP_Math:包含了许多数学函数,特别对于矢量运算
- AC_PID:PID控制器库
- AP_InertialNav:扩展带有gps和气压计数据的惯性导航库
- AC_AttitudeControl:姿态控制相关库
- AP_WPNav:航点相关的导航库
- AP_Motors:多旋翼和传统直升机混合的电机库
- RC_Channel:更多的关于从APM_RC的PWM输入/输出数据转换到内部通用单位的库,比如角度
- AP_HAL,AP_HAL_AVR,AP_HAL_PX4:硬件抽象层库,提供给其他高级控制代码一致的接口,而不必担心底层不同的硬件。
- 传感器相关库
- AP_InertialSensor:读取陀螺仪和加速度计数据,并向主程序执行标准程序和提供标准单位数据(deg/s,m/s)。
- AP_RangerFinder:声呐和红外测距传感器的交互库
- AP_Baro:气压计相关库
- AP_GPS:GPS相关库
- AP_Compass:三轴罗盘相关库
- AP_OpticalFlow:光流传感器相关库
- 其他库
- AP_Mount,AP_Camera, AP_Relay:相机安装控制库,相机快门控制库
- AP_Mission: 从eeprom(电可擦只读存储器)存储/读取飞行指令相关库
- AP_Buffer:惯性导航时所用到的一个简单的堆栈(FIFO,先进先出)缓冲区
关于库的导航图,如下:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号