



















BlueROV2入门教程-配置电机
BlueROV2入门教程-配置电机
说明:
- 本教程介绍如何在QGroundControl上配置电机
概述
电机方向取决于机器人和电机的组装方式,因此必须在软件中配置每个电机的正反转
在QGroundControl打开的
车辆设置页面,然后选择左侧边栏中的电机选项卡,然后继续进行自动(推荐)或手动配置
注意:在BlueROV2的电机启动时,请确保没有身体部位和衣服接触到电机
注意:请不要在空气(非水下环境)中运行电机超过30秒,否则会导致塑料轴承磨损
自动配置
注意:进行自动配置前请进行下水前测试,不要贸然没准备就下水
调整配重铅块位置使BlueROV2在水中处于平衡状态
将BlueROV2放在有足够空间的水中,使其能够略微移动,而不会撞到墙壁或底部。确保BlueROV2的通信系绳有一点松弛,以便可以自由移动。
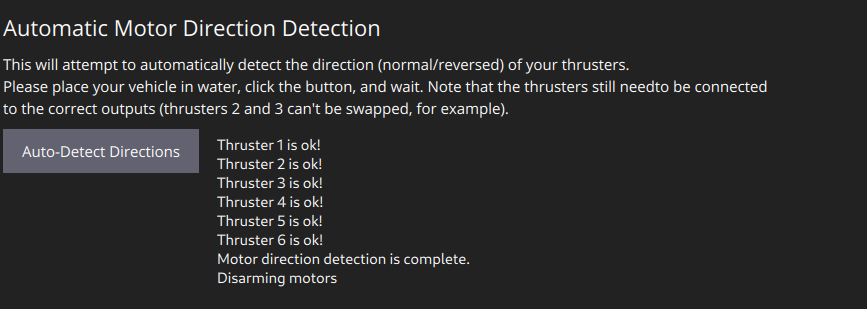
单击
自动检测方向按钮,然后等待BlueROV2执行电机方向检测程序检查程序的结果将随着检测程序的进行而出现,并提示成功或失败。如果例程失败,则可以重试或者进行手动设置 。
手动配置
在QGroundControl打开的
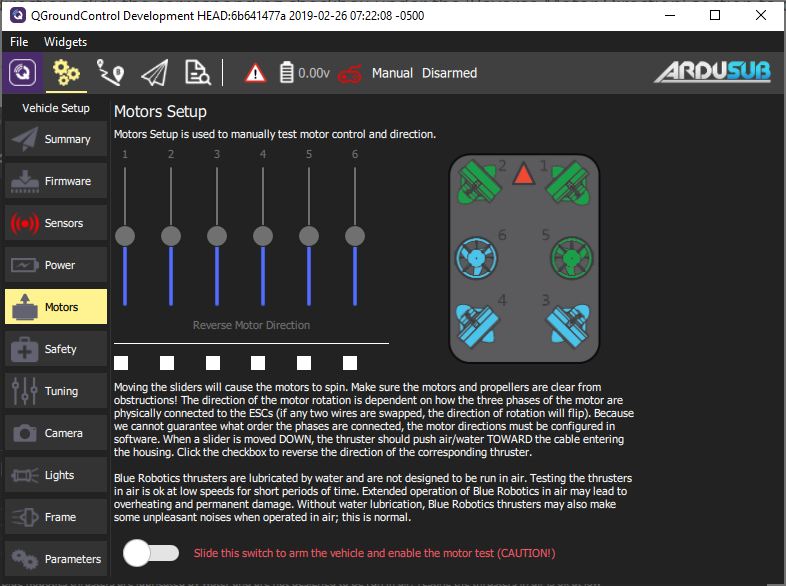
车辆设置页面,然后选择左侧边栏中的电机选项卡阅读并理解设置页面上的说明
通过单击页面上的开关按钮来开启或关闭BlueROV2的电机控制
一次移动一个滑杆,并确保旋转的电机正在推动空气,如“电动机设置”页面上的说明中所述
如果电动机旋转方向错误,请单击“电动机反向”部分下的相应复选框以更正电动机旋转
通常情况下,电机1、2、5的电机转向应该设置为与电机3、4、6是相反的
电机1、2、5顺时针转动时,电机3、4、6应该时逆时针转动
完成设置后,通过单击开关按钮关闭电机控制
- 配置完,需要下水测试验证配置是否正确
注意:进行自动配置前请进行下水前测试,不要贸然没准备就下水
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号