



















BlueROV2入门教程-传感器校准
BlueROV2入门教程-传感器校准
说明:
- 本教程介绍如何QGroundControl里进行相应的传感器校准
操作步骤
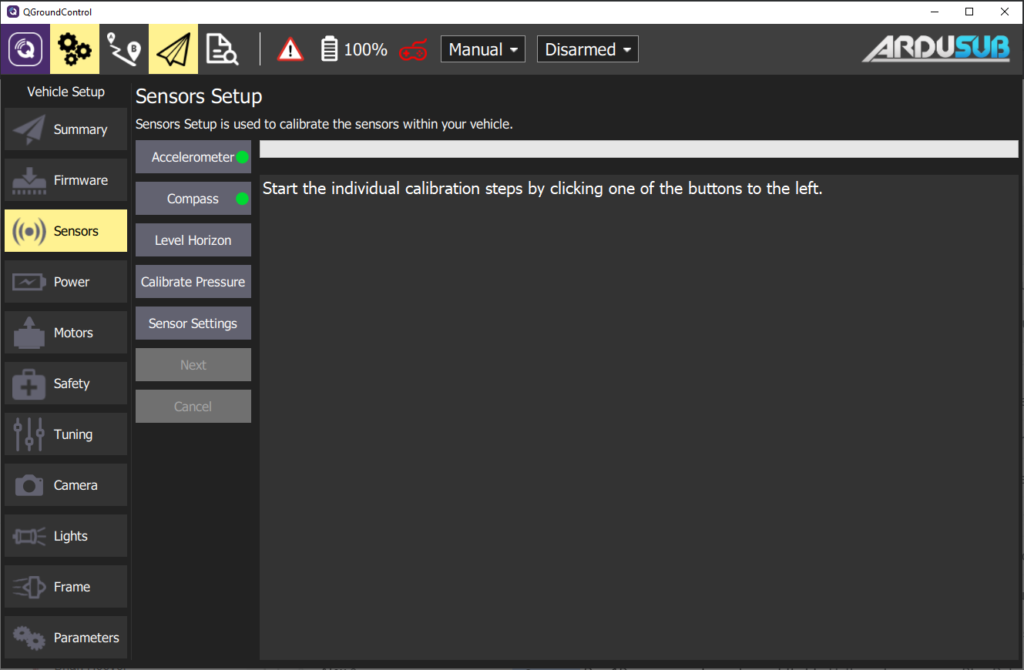
打开QGroundControl中
载具设置页面(齿轮图标),然后点击左侧边栏中红色的传感器选项卡单击
加速度计飞控方向选择Roll90后点击确认,通常不需要修改此项- 根据图示说明,调整水下机器人的摆放方向
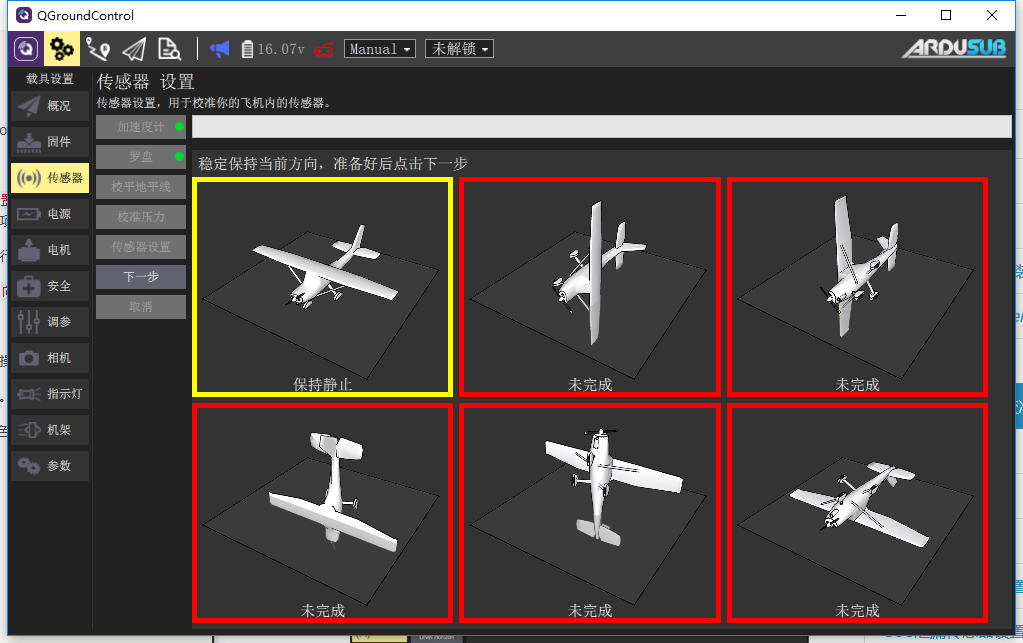
单击
罗盘- 飞控方向选择
Roll90后点击确认,通常不需要修改此项 - 根据图示说明,抬起机器人往不同的方向摆动,此时可发现进度条的值在不停增加
- 飞控方向选择
单击
校准压力,其会自动进行校准,然后等待校准完成即可- 完成后,
传感器选项卡将不再带有红色标志
- 完成后,
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号