



















BlueROV2入门教程-硬件组装(三)
BlueROV2入门教程-硬件组装(三)
说明:
- 本教程介绍BlueROV2水下机器人的电池密封舱安装、如何进行真空测试还有电子部件的接线
组装电池密封舱部分
要完成电池密封舱部分的组装,您需要以下零件和工具:
- 1 x 标有“Extra Blank Penetrators2]”的袋子
- 1 x 硅脂(10g)
- 1 x 带有4个孔的3英寸端盖
- 1 x 穿透扳手
- 1 x 带XT90接头的3.5mm红黑线
- 1 x 1.5英寸的热收缩片
- 1 x 热风枪,吹风机或打火机
在O形圈上涂硅脂
将O形圈安装到电池电源线穿线螺栓上
将穿线螺栓穿线螺栓安装到端盖的开口中
将一个螺母(红色)安装到电池电源线穿线螺栓上,并用穿透扳手拧紧
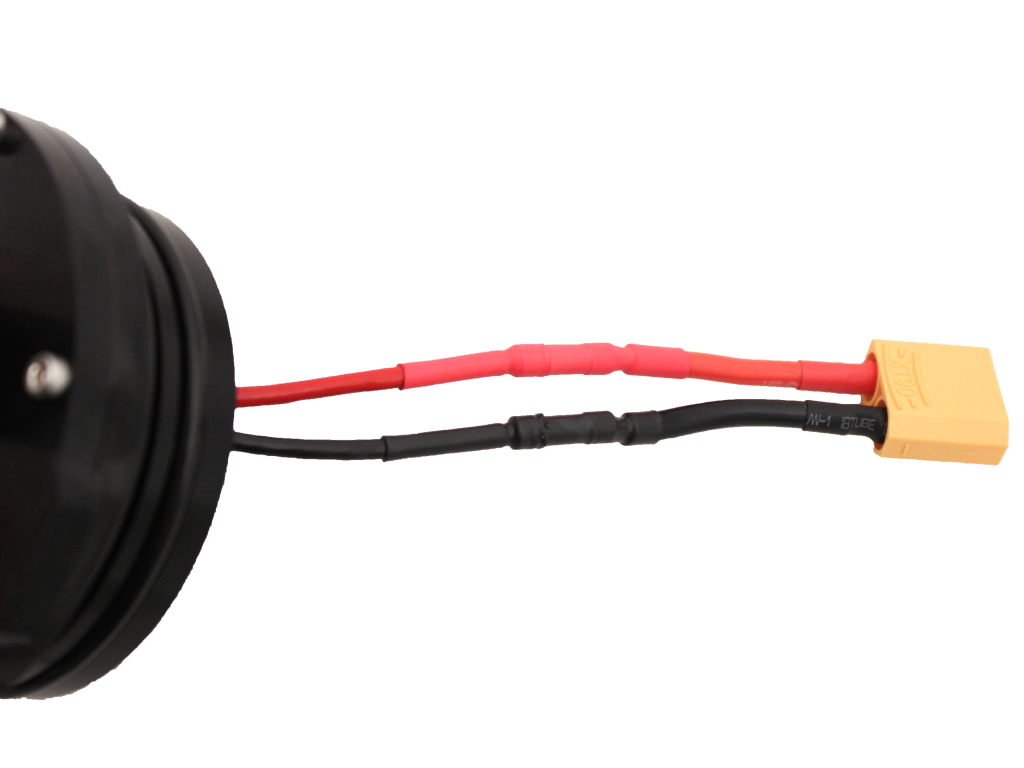
将1.5英寸长的黑色热缩管放在电池电源线穿透螺栓的末端
使用热风枪,吹风机或打火机对热缩物施加热量,直到热缩物牢固地附着在穿透器上并紧贴两根电线。您应该能够通过热收缩看到穿透螺栓中的螺纹

- 电源线接线
- 如果要进行可选的初步真空测试,请从排气孔穿透螺栓上卸下排气孔塞,然后将端盖安装到电池密封舱上。您还需要卸下电子设备外壳上的排气孔穿透螺栓的排气孔塞
初步真空测试(可选)
注意:这是组装过程中执行真空测试的最佳节点。由于您已经安装了所有穿透螺栓,但没有进行任何布线,因此故障排除将尽可能地容易。本步骤将需要使用套件随附的真空泵。
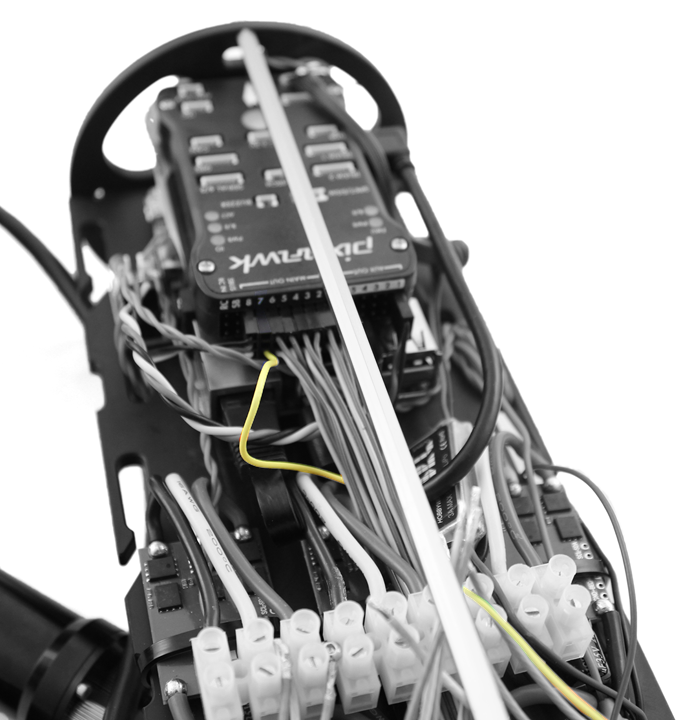
- 组装好电子部件部分,如下图

- 组装三通的真空泵
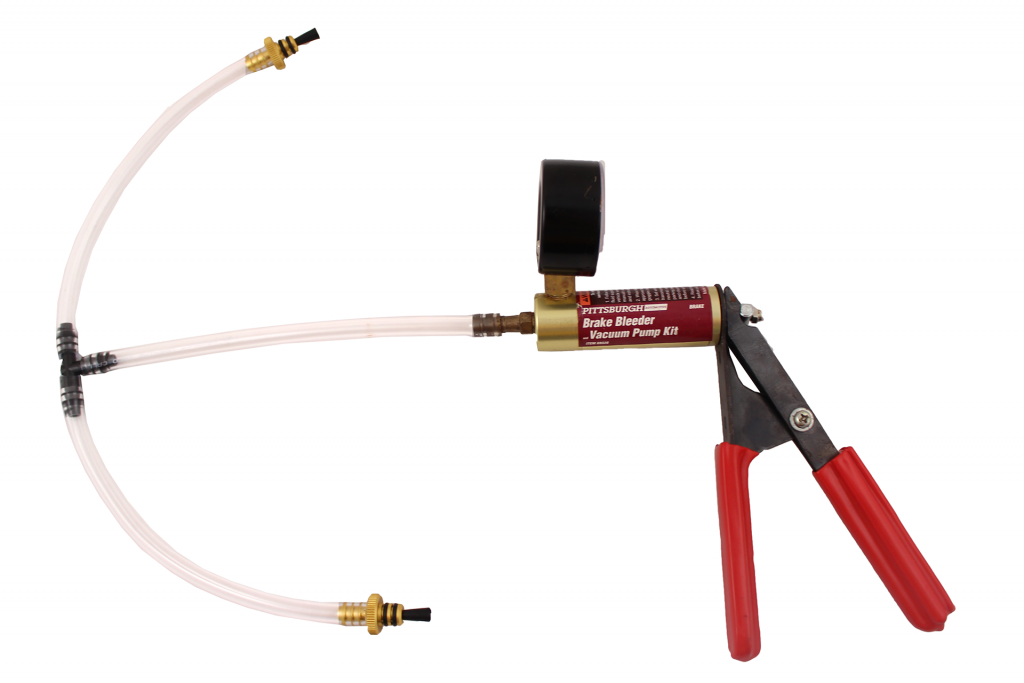
测试真空泵,确保其没有泄漏,测试教程
将其中一个真空塞插入电池密封舱的排气孔上

- 将另一个真空塞插入电子部件密封舱的排气孔上
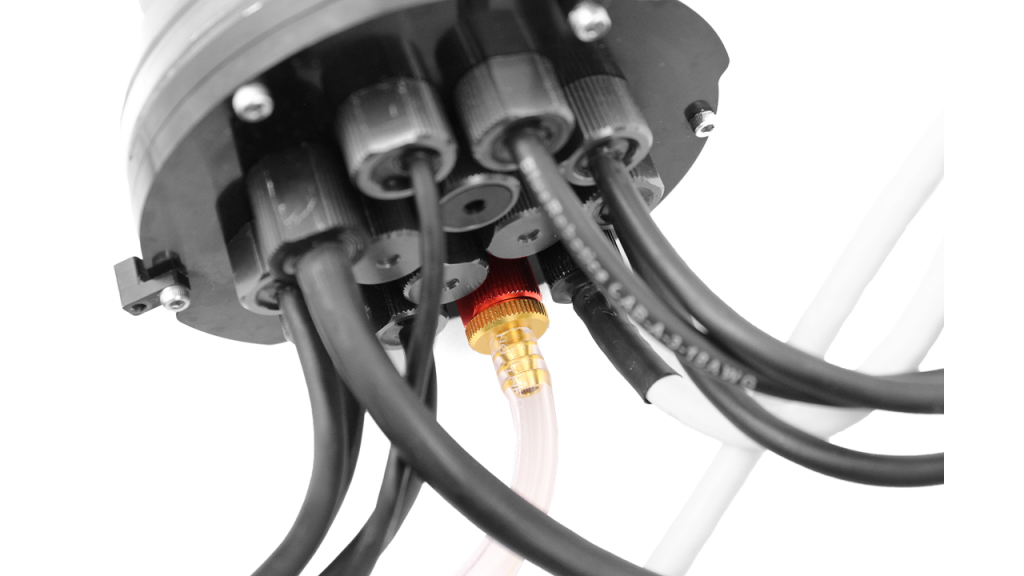
- 抽真空,直到仪表读数为10 in. Hg [34 kPa]。如果无法抽真空,请跳到下面检测步骤进行测试

让BlueROV2和泵静置15分钟
如果15分钟后压力表的读数超过9 in. Hg [34 kPa],则可以接受该密封舱

如果15分钟后真空计的真空度读数低于9 in. Hg [34 kPa],则应检查以下各项:
1.确保使用M2.5内六角螺丝刀拧紧电池和电子部件密封舱前后盖上的M3螺丝。如果能够拧紧一个或多个,请再次尝试真空测试
2.确保电池和电子设备外壳上的穿透螺栓已完全拧紧。请尝试用手松开进行检查。如果能够松动一个或多个,请拧紧它们,然后再次尝试进行真空测试。
3.确保所有的O形圈都安装在穿透器中。如果缺少任何组件,请安装,然后再次尝试进行真空测试。
4.检查面部密封O形圈和径向O形圈是否已正确安装在电池和电子设备外壳中。如果发现O形圈损坏或丢失,请安装并再次尝试真空测试。
5.如果仍然无法保持真空,请与官方联系:support@bluerobotics.com要继续组装BlueROV2 ,需要分离电子部件密封舱的带球形罩的丙烯酸管和4英寸法兰部分
接线部分
- 要安装穿透器的导线,您将需要以下零件和工具:
- 1 x 大号十字螺丝刀
注意:如果套件没有包含到照明灯,可以跳过有关照明灯接线的部分
电源部分接线
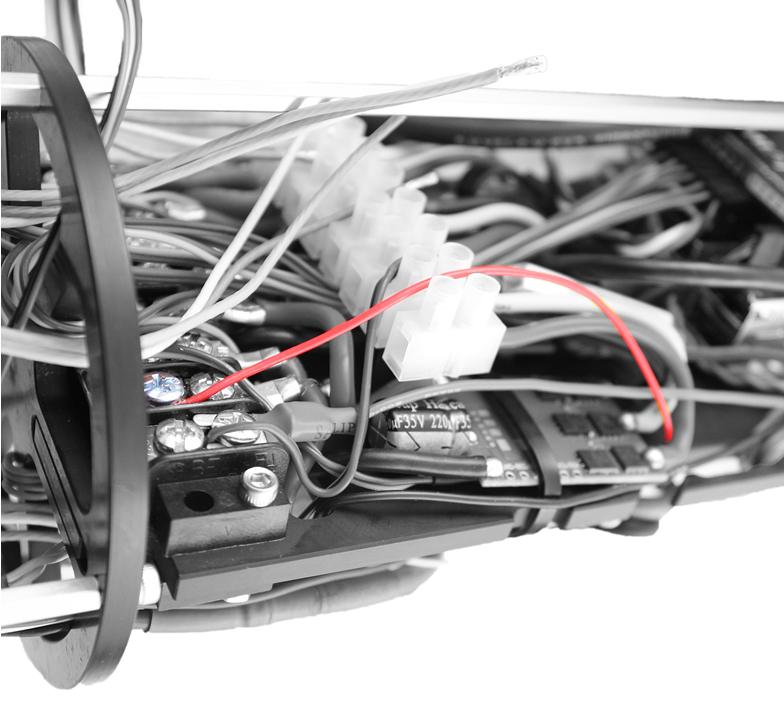
接上电源的XT60接头

- 用其他红色电线将流明电源线(红色)连接到电源接线盒。 使用从底部倒数第二个的后螺钉端子。为了使电缆布线整齐,请使电缆穿过ESC导线,并去除大部分松弛部分
- 照明灯的红黑线接线位置,如下切记注意确认好接线的螺丝位置

信号线部分接线
要安装穿透器的导线,您将需要以下零件和工具:
1 x 小号一字螺丝刀将照明灯信号线连接到Pixhawk通道7,黄色线朝向Pixhawk的底部
- 将Bar30压力传感器的信号线连接到Pixhawk上的I2C端口

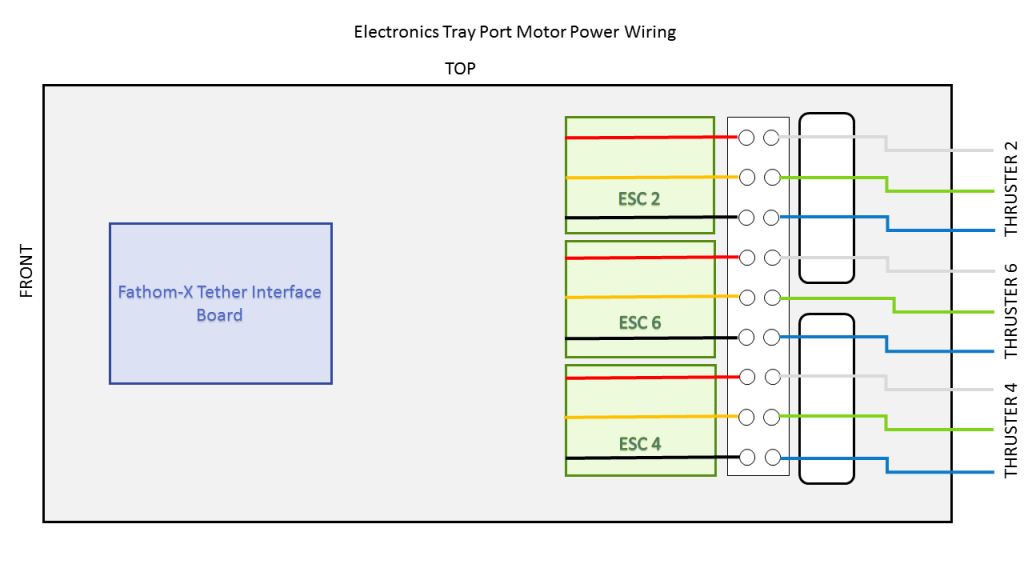
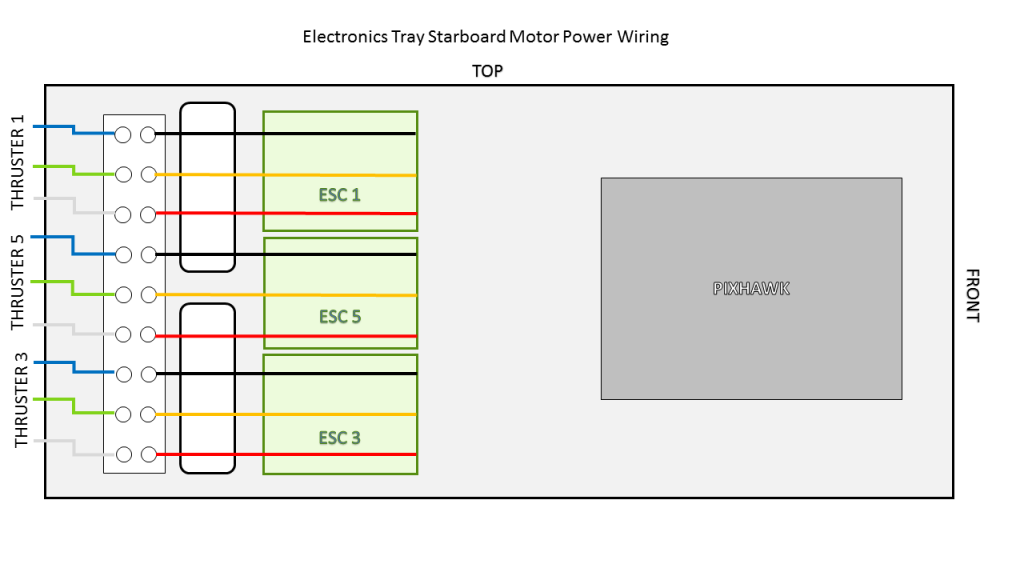
- 根据下图,接上电机线,注意颜色对应
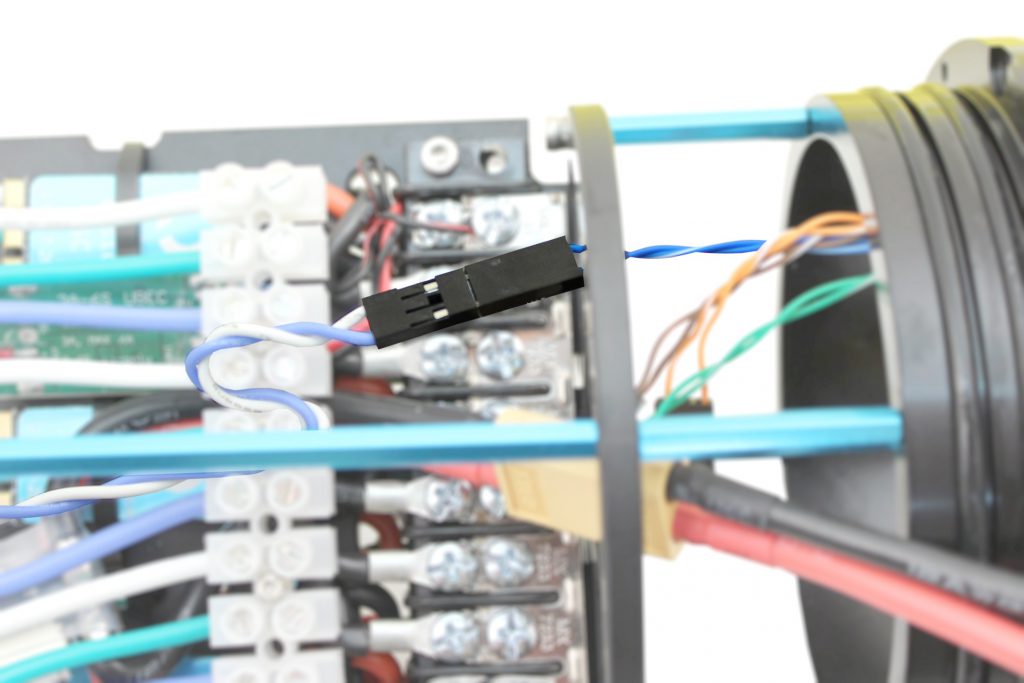
- 带有蓝色和白色电线的端子线连接到与Fathom-X束线穿透螺栓相连的蓝白端子线。其他6根线当前则不需要理会,它们是为了将来的扩展
如果您收到BlueROV2在2018年8月7日之前,则以下步骤适用于R1系链:
将系绳连接到Fathom-X系绳接口板;其他6根线当前则不需要理会,它们是为了将来的扩展

- 如果您收到BlueROV2在2017年3月14日之前,则需要安装SOS泄漏传感器。
布线整理
要布线电子部件密封舱中的电线,以使其接触到圆管上,您需要以下零件和工具:
- 3 x 扎带
- 1 x 剪刀
在starboard一侧(Pixhawk一侧),整理Bar30的接线和照明信号线,并用一条扎带将其拉紧到马达接线盒的稍长的铝柱上。确保扎带的头和电线朝向里面,不接触到圆管

- 在port一侧(Fathom-X系绳接口板侧)整理Fathom系绳线,并用拉链将其绑在铝柱上,大约与Fathom-X系绳端子板的背面齐平,大约与电动机接线盒齐平。确保扎带的头和电线朝向里面,不接触到圆管

获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号