



















OpenROV入门教程-网页控制
说明:
- 介绍openrov如何网页控制
步骤:
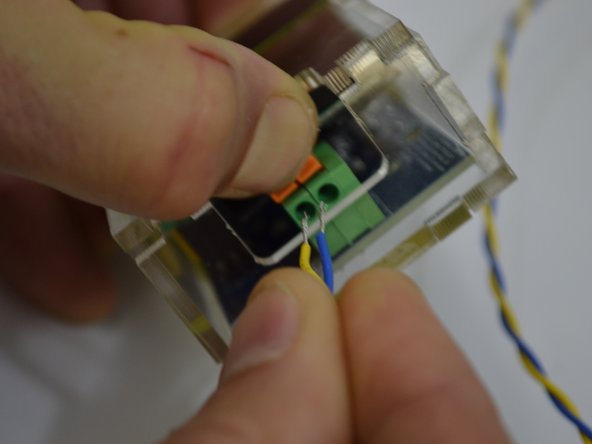
OpenROV连接到计算机
如图所示,将系绳插入顶部适配器
连接以太网电缆。
连接USB电缆。
USB电缆充当您的On / Off开关,插入时打开OpenROV,拔出时关闭。这样可以防止不使用时电池耗尽,并可用于快速关闭设备电源。


连接到您的OpenROV
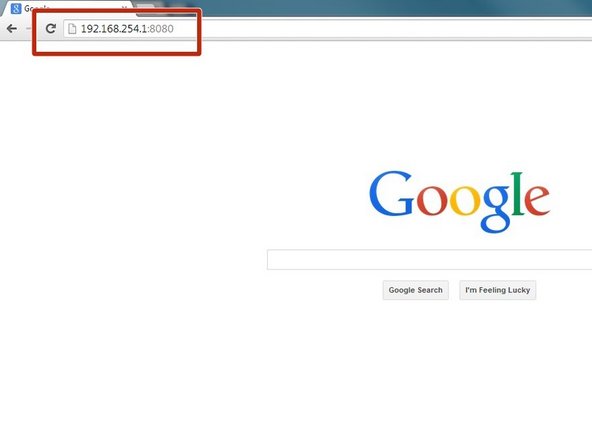
打开Google Chrome浏览器。如果您没有最新版的Google Chrome浏览器,则可以在此处获取它。这是一个免费下载。
Chrome是唯一完全支持该软件的浏览器,必须使用。
在能够登录到ROV之前,需要一些时间来启动。打开OpenROV后至少等待2分钟,然后再尝试登录。
在顶部的状态栏中,输入192.168.254.1:8080,这是OpenROV的IP地址。按“输入”,然后等待10到20秒钟。很快就会出现OpenROV座舱。
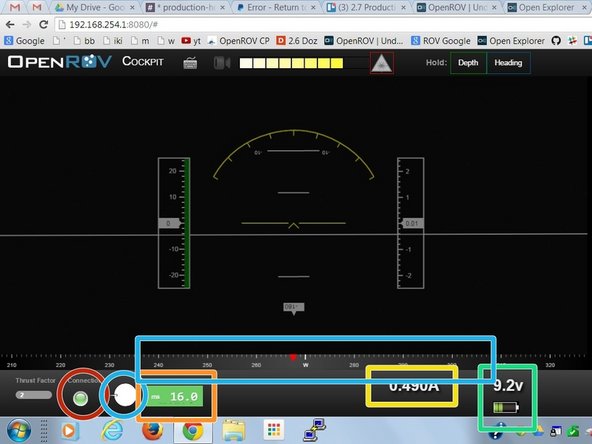
- 座舱,连接性和电池状态
红色圈:连接性(绿色=已连接)
橙色圈:延迟(如果出现问题,它将显示+999)
黄色圈:电流消耗(只是电子设备不包括电动机)
绿色圈:电池电压(对于LiFe-PO4电池标称值为9.2V左右,该图标可能显示半满,这是正常的)
蓝色圈:指南针/航向(仅适用于IMU)
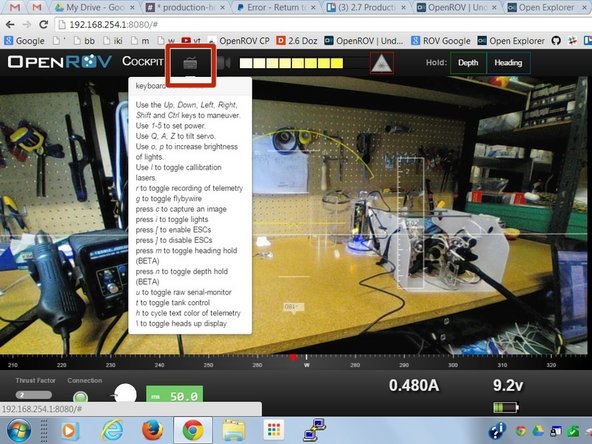
- 驾驶舱,控件(键盘),单击键盘图标以调出座舱的击键命令。
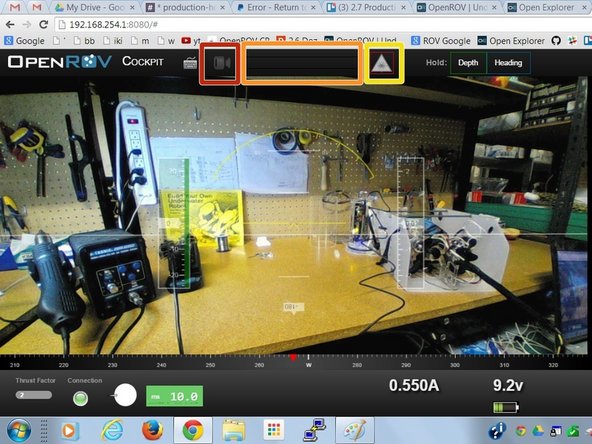
- 座舱,灯光和摄像头控件
红色框:相机倾斜指示
橙色框:LED指示灯
黄色框:缩放激光开/关指示器
- 驾驶舱,遥测
红色框:标题(指南针),这基于OpenROV在启动时所面对的方向。可以通过在启动时将OpenROV对准北方来进行校准。
橙色框:电机推力值(不需要IMU)
黄色框:深度
绿色框:横滚和人造地平线
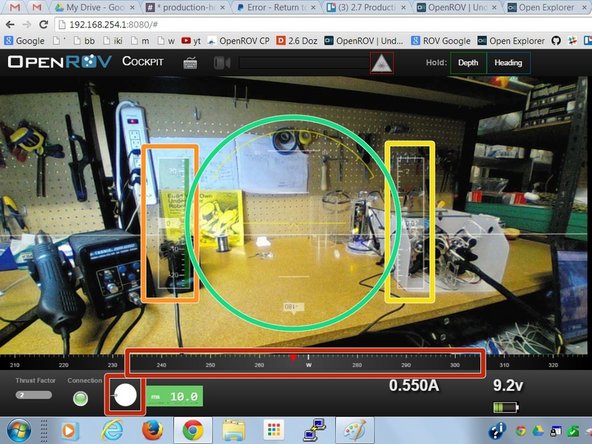
- 座舱,推力和保持设置
推力设置(1,最低和5,最高)会改变提供给电机的功率。典型用法是2-3。大量使用5级电池会很快耗尽电池电量,建议仅在快速撤退和间断使用时才使用。
在上方,您可以看到深度和航向保持指示器。这些可以打开/关闭以保持当前深度和/或当前航向。此功能仅在深度/航向/ IMU升级中起作用。

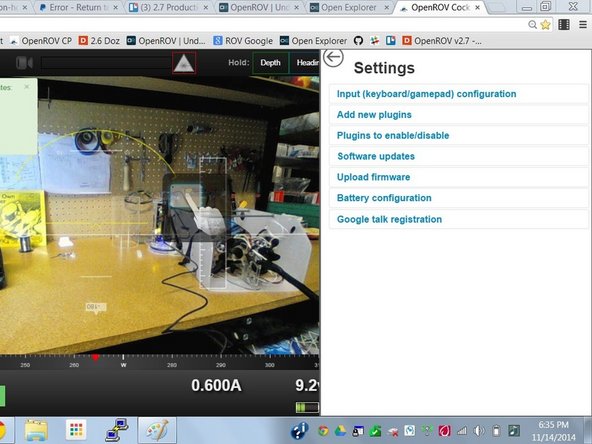
- 座舱,设置窗格
设置窗格:
输入配置-在这里您可以更改和自定义按键和按钮关联。
添加新插件-适用于想要使用第三部分插件的用户(高级)。
启用/禁用的插件-打开和关闭上面加载的插件(高级)。
软件更新-我们建议您始终更新软件。这还会显示您当前的软件版本。
电池配置-在这里您可以设置电池指示器的最小和最大电池电压。
Google Talk注册-此标签可让您访问座舱的社交媒体功能(高级)。
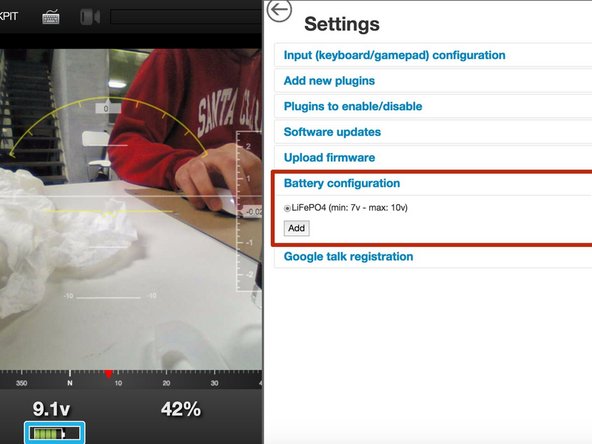
- 设置电池配置
红色框:确保为正在使用的电池设置配置。
橙色框:输入化学试剂的电池名称以供参考。
黄色框:输入最大电压。
绿色框:输入最小电压。
蓝色框这些电压电平用于告诉您还剩多少功率。
电量耗尽时,请确保终止潜水。如果您继续潜水超过电池电量不足的水平,则在某些情况下可能会损坏电池
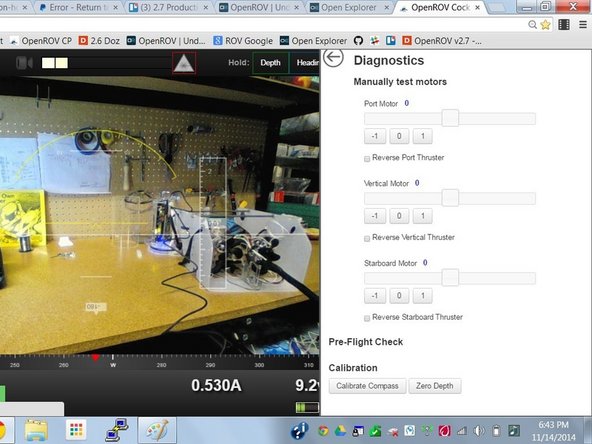
- 座舱,诊断窗格
诊断窗格:
手动测试电动机,用于手动运行电动机。该窗格还用于反转特定电动机的方向。
飞行前检查是时间的占位符。
指南针和零深度的校准也在这里。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号