



















OpenROV入门教程-完成组装
说明:
- 介绍openrov如何完成组装,加工
步骤:
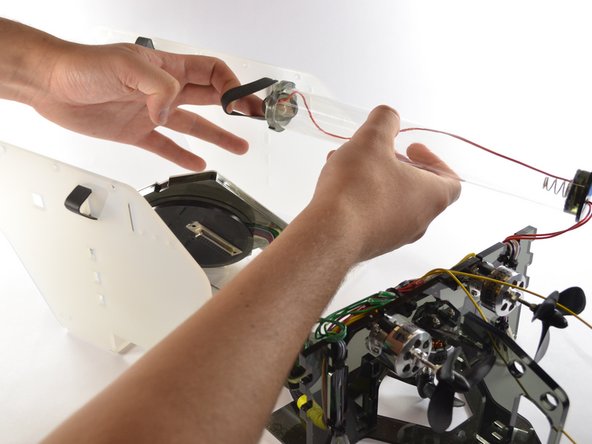
- 安装电池管
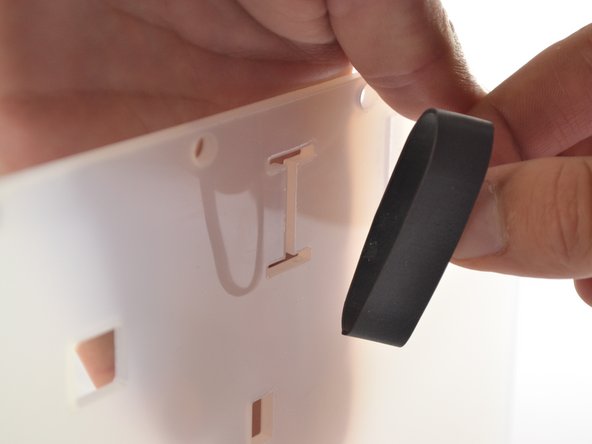
- 像许多其他部件一样,外壳是在激光切割机上切割的。在此过程中,某些碎片可能会卡在孔中。这些可以很容易地戳出来。






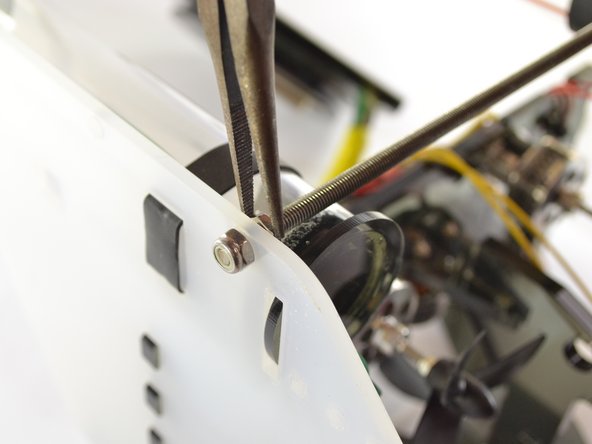
- 螺纹杆
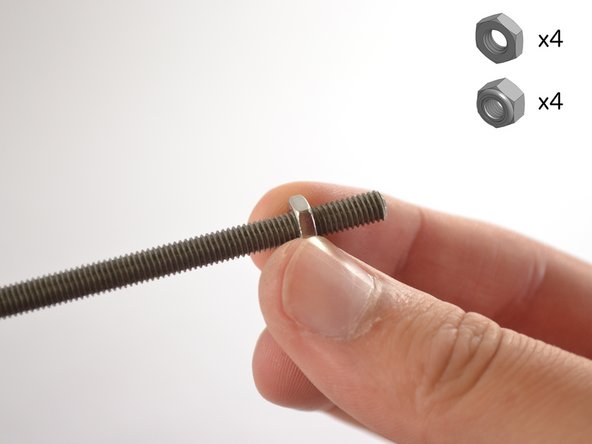

- 使用朝相反方向旋转的钳子拧紧锁紧螺母。仅应拧紧它们,以使杆与防松螺母的外部齐平。
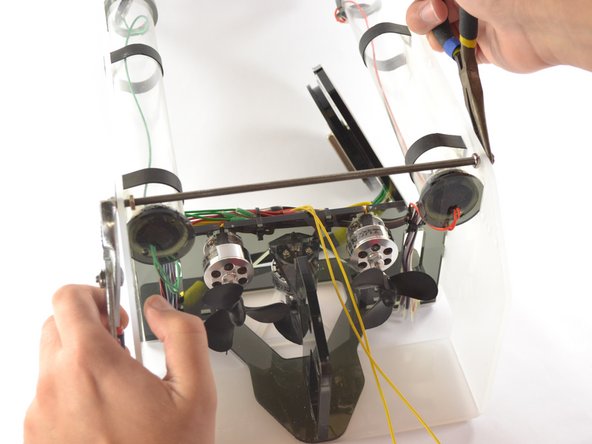
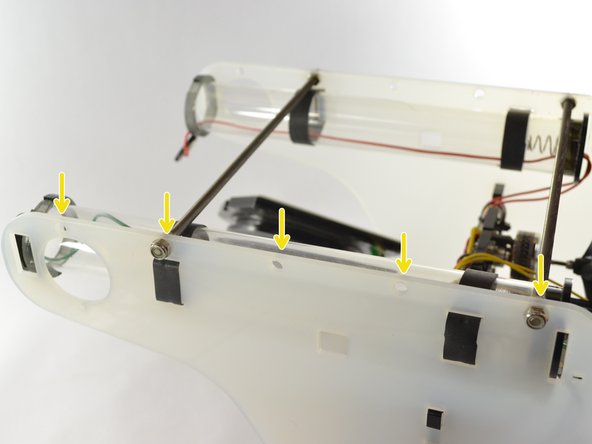
- 一旦您拥有安全的结构以及您的喜欢程度。用手指拧紧内部防松螺母以固定外壳。
- 根据所携带的有效载荷,这些杆可位于不同的孔中。
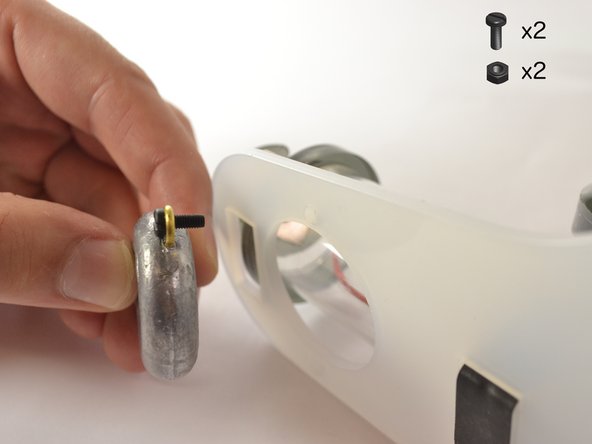
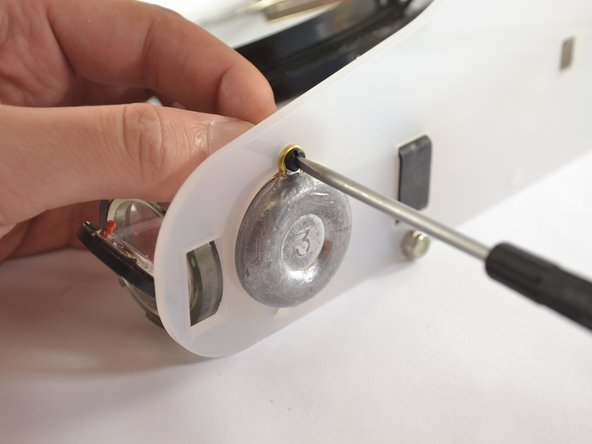
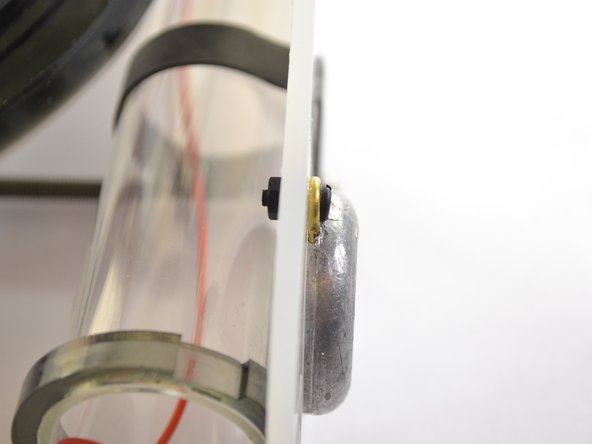
- 权重

- 可以卸下重物,以使ROV保持中性负载。


- 贴纸



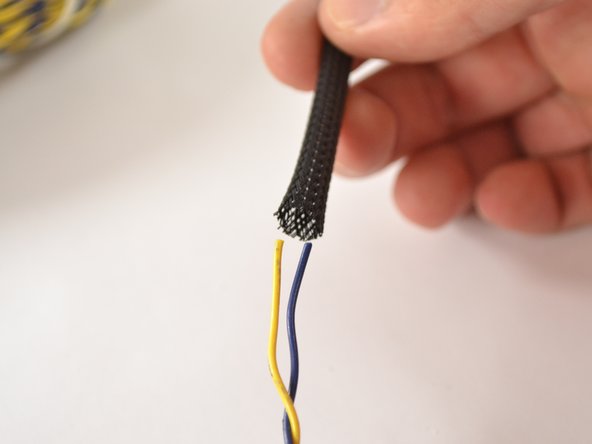
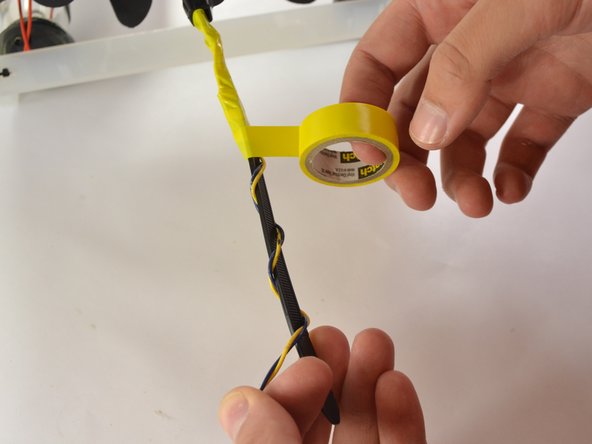
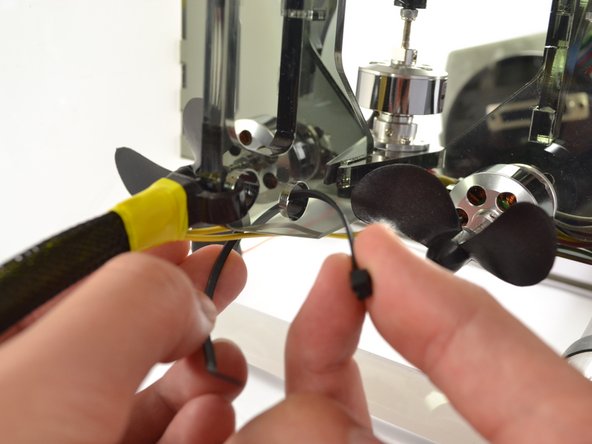
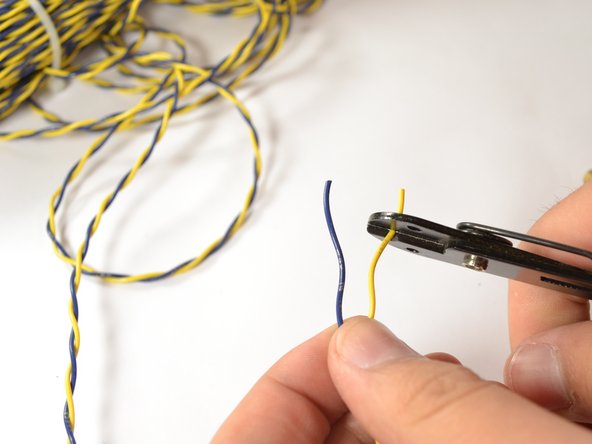
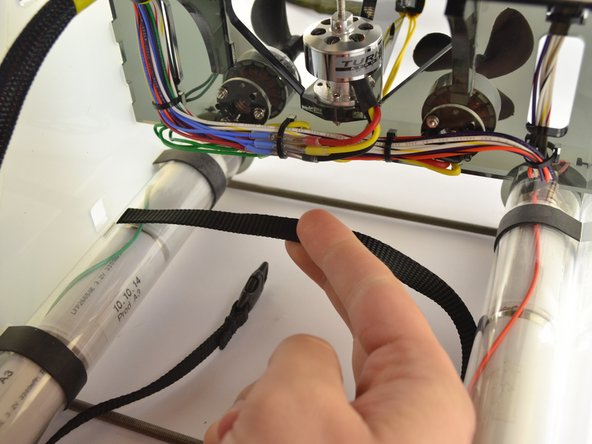
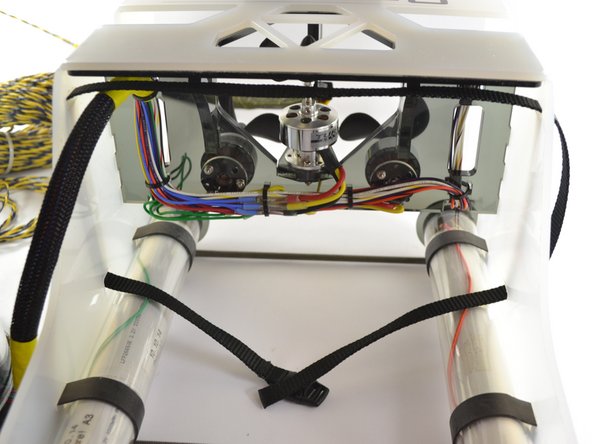
- 系绳
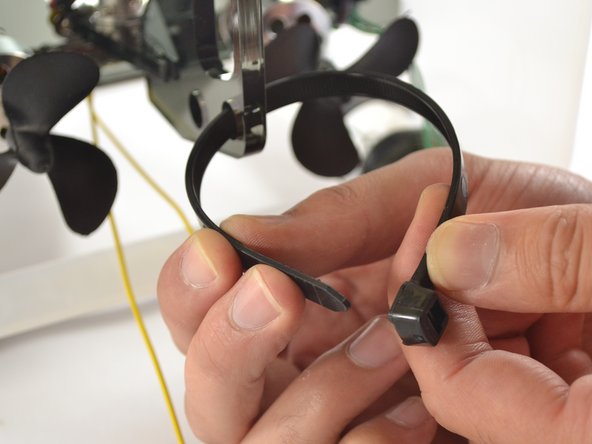
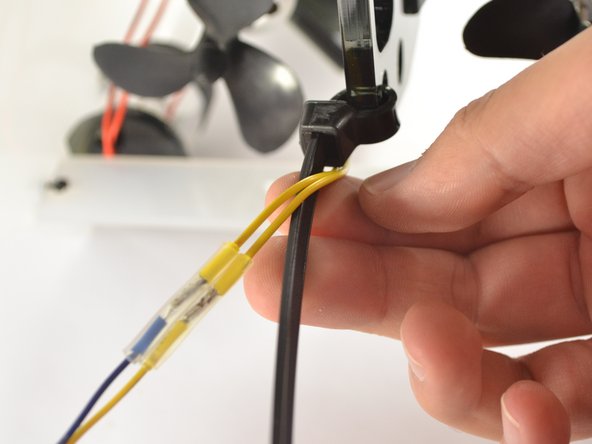
- 大号拉链将用来拉紧系绳。

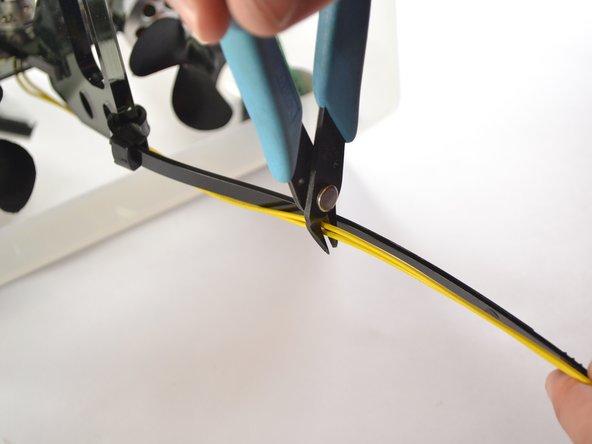
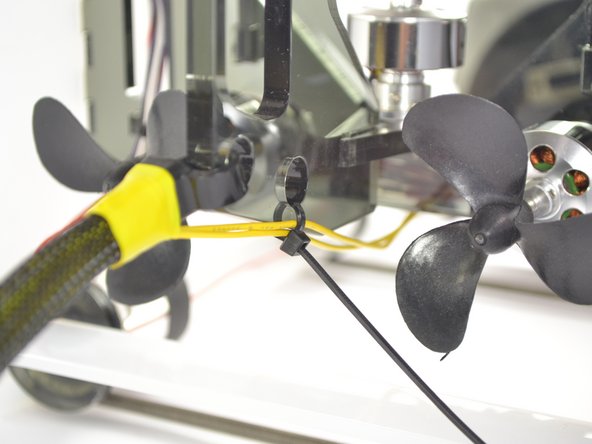
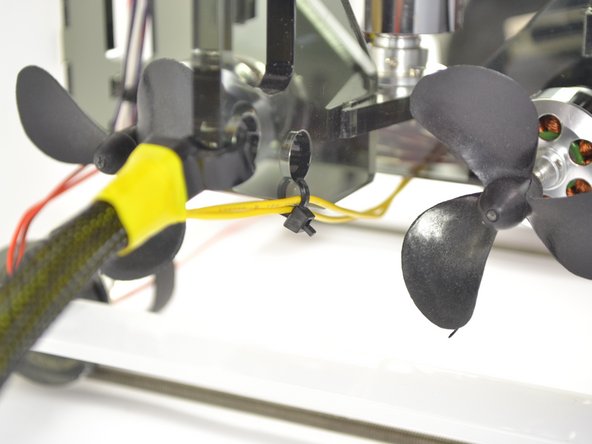
- 不要剪开拉链。拉紧黄色电线,以免它们挡住螺旋桨。
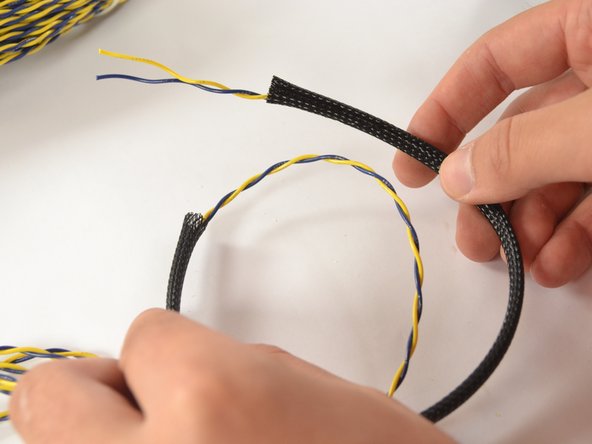
- 绕开3米长的电线,不剪断拉链。
- 系绳的颜色无关紧要。





- O形圈

- 由于O形圈非常适合与管子配合,建议在O形圈上使用润滑剂以确保O形圈正确就位。我们喜欢使用一种称为“ MagicLube”的通用润滑剂,该润滑剂可在许多五金店买到。要将润滑脂涂抹在O形圈上,请在手指上挤压少量润滑脂,然后将O形圈穿过手指。


- 仅将O形圈放在两个电池管的端盖上。套件中有3个电池管端盖。这些部件未连接到ROV,因此可能会丢失。第三是备用。


- 安装电池

- 电池的正极朝着灯管的前部。


- 前端盖应倾斜,以便车辆可以平放。
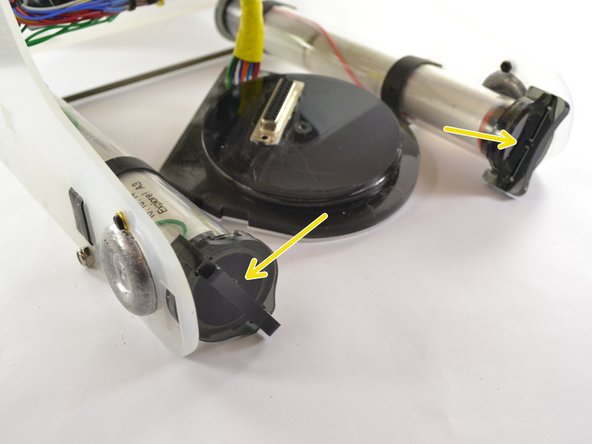
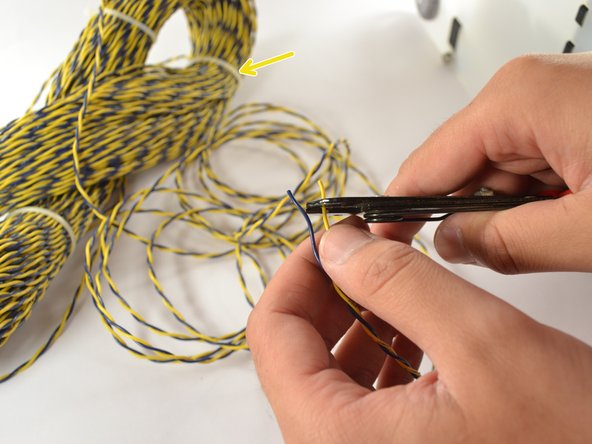
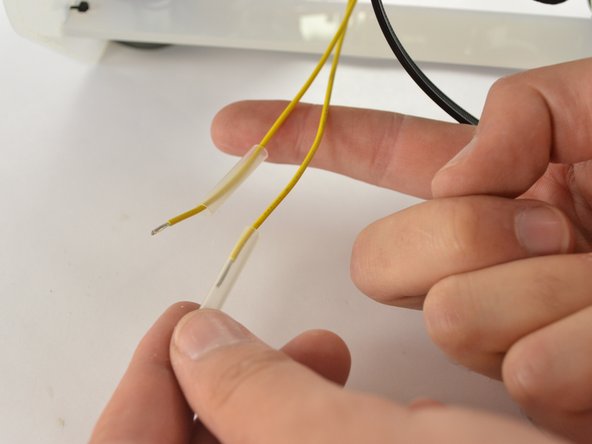
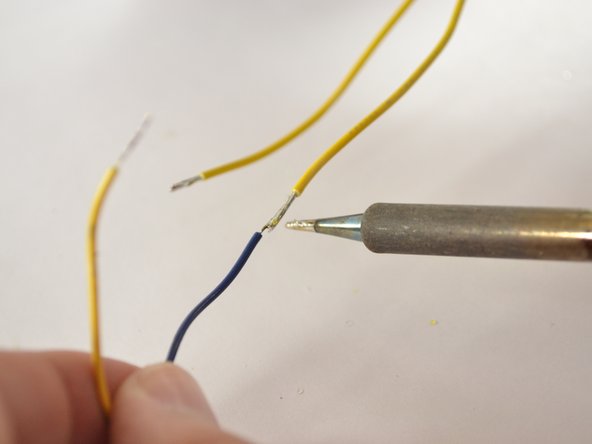
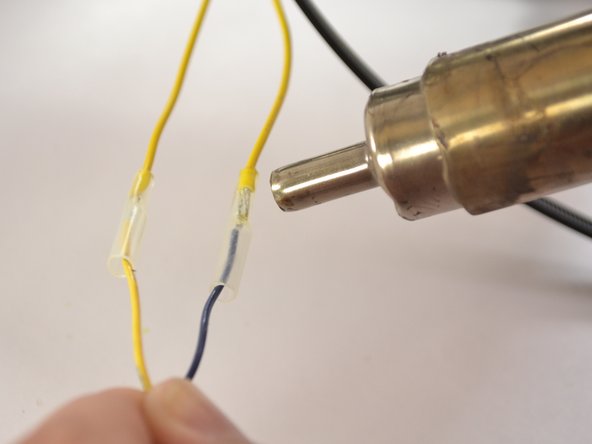
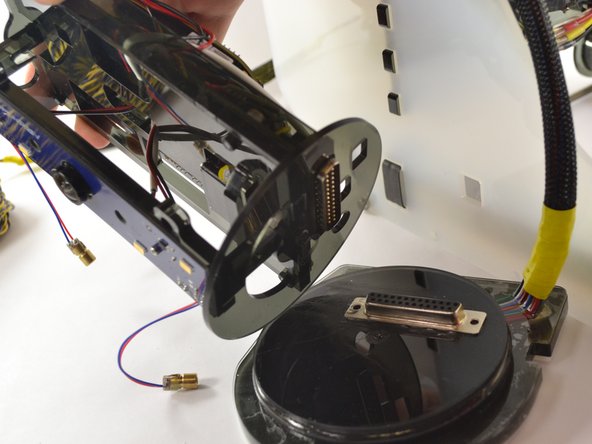
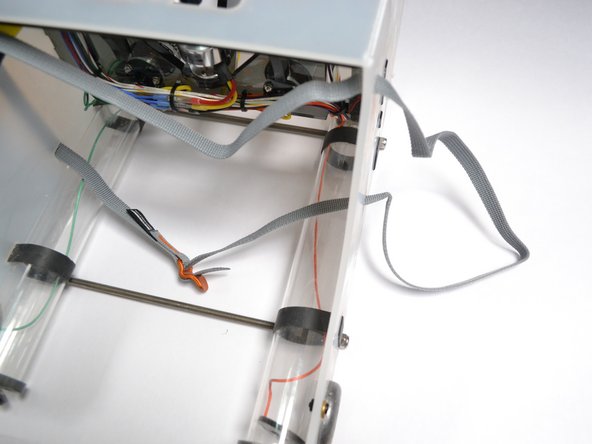
- 连接电子


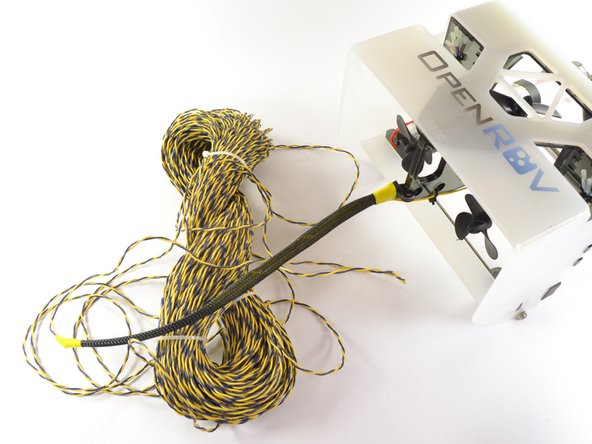
- 绕开约3米长的电线,而无需从系绳另一端取下拉链。
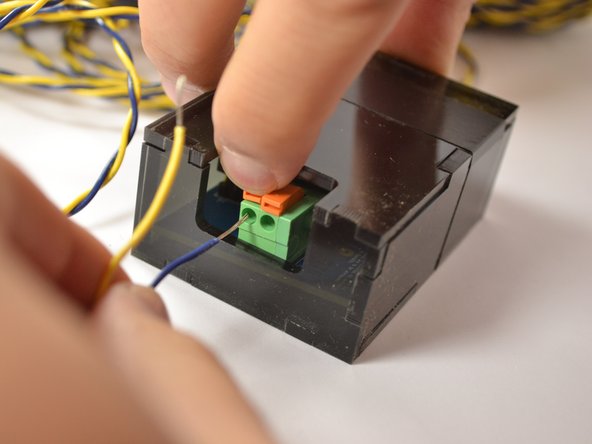
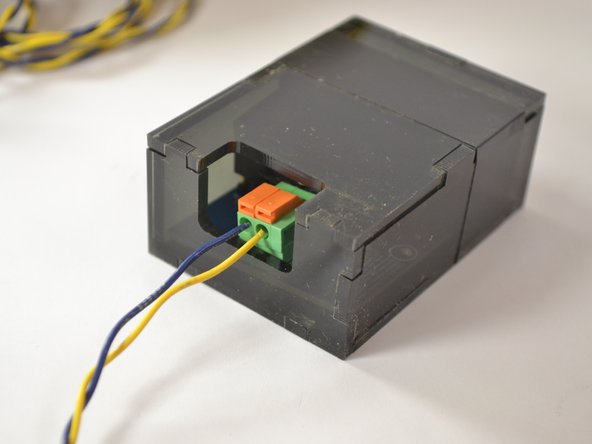
- USB电缆充当您的On / Off开关,插入时打开OpenROV,拔出时关闭。这样可以防止不使用时电池耗尽,并可用于快速关闭设备电源。

- 连接到您的ROV
- 将以太网和USB电缆的另一端插入笔记本电脑,并观察ROV的电源!USB连接器充当ROV的开/关开关。ROV具有内置的静态IP地址192.168.254.1,因此要与其连接,计算机的以太网IP地址应位于同一子网中,即“ 192.168.254.2”。子网掩码应设置为255.255.255.0。

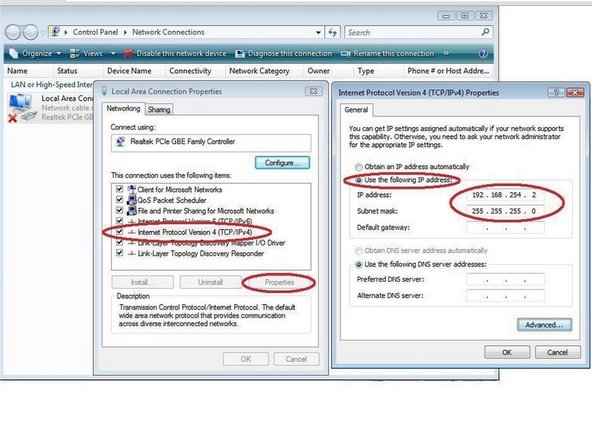
- Windows Vista:转到控制面板->网络和共享中心->单击左侧栏上的“管理网络连接”。然后r单击“局域网”-> l单击属性-> l单击“ Internet协议版本4”-> l单击“属性”,然后选择选项“使用以下ip地址”,然后输入192.168.254.2。
Windows 7:转到控制面板>网络和Internet>网络和共享中心>单击左侧栏上的“更改适配器设置”。然后,右键单击“本地连接”>“属性”,然后单击“ Internet协议版本4”,然后单击属性。选择选项“使用以下IP地址”,然后输入192.168.254.2。
Windows 8:转到控制面板>网络和Internet>网络和共享中心>单击左侧栏上的“更改适配器设置”。然后,右键单击“以太网”>属性,然后单击“ Internet协议版本4”,然后单击属性。选择选项“使用以下IP地址”,然后输入192.168.254.2。
Windows 10: go to control panel > network and internet > network and sharing center > click on "change adapter settings" on the left-hand bar. Then r-click on "Ethernet" > properties > l-click on "Internet Protocol Version 4" and click on properties. Select the option "use the following ip address" and enter in 192.168.254.2.
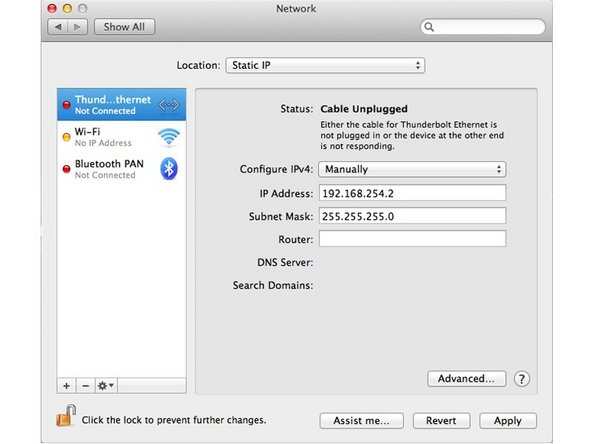
- OS X(Mac):打开“系统偏好设置”,单击“网络”。从位置下拉列表中选择“编辑位置”。单击(+)并创建一个名为“ OpenROV”的新位置。在左侧选择您的以太网适配器,然后从“配置IPv4”下拉列表中选择“手动”。将IP地址设置为192.168.254.2,并将子网掩码设置为255.255.255.0。按下[套用]。
使用ROV时,您需要打开Network(网络)并将Location(位置)更改为OpenROV(然后按Apply(应用))。完成后,您将需要将位置更改回“自动”,以便您的互联网正常工作。
- 打开Google Chrome浏览器。如果您没有最新版的Google Chrome浏览器,则可以在此处获取它。
在能够登录到ROV之前,它将需要一些时间来启动。打开ROV后至少等待2分钟,然后再尝试登录。
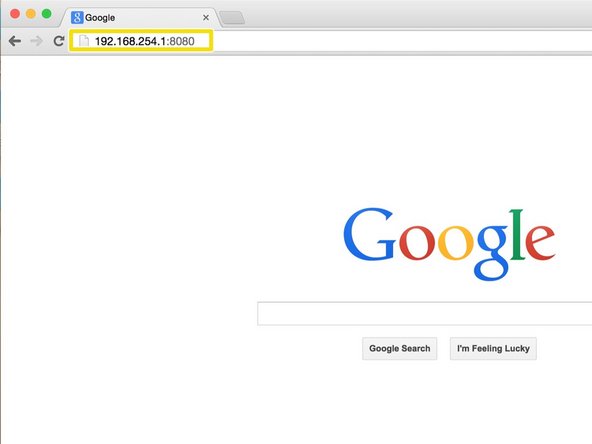
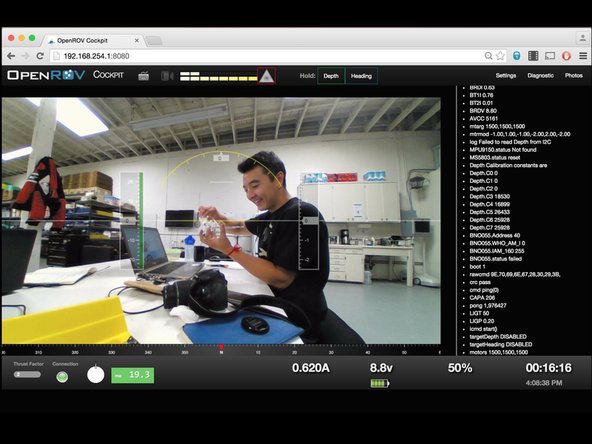
在顶部的状态栏中,输入192.168.254.1:8080,它是ROV的IP地址。按下“ enter”并交叉手指。很快就会出现OpenROV座舱。该页面可能需要10到20秒才能完成加载。
连接有问题吗?查阅我们的《连接故障排除指南》。
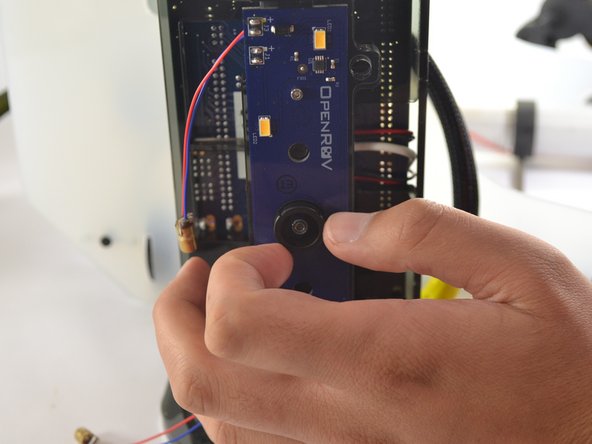
- 相机对焦


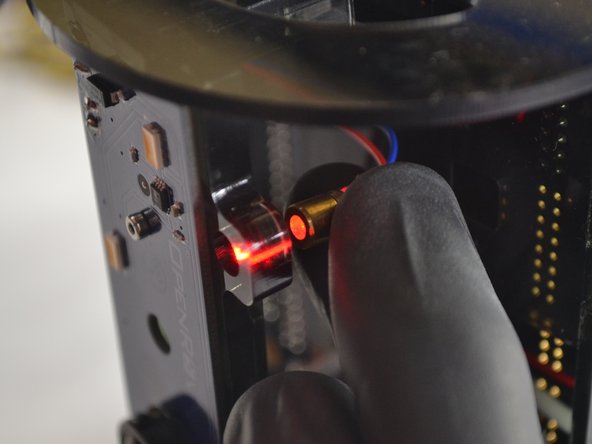
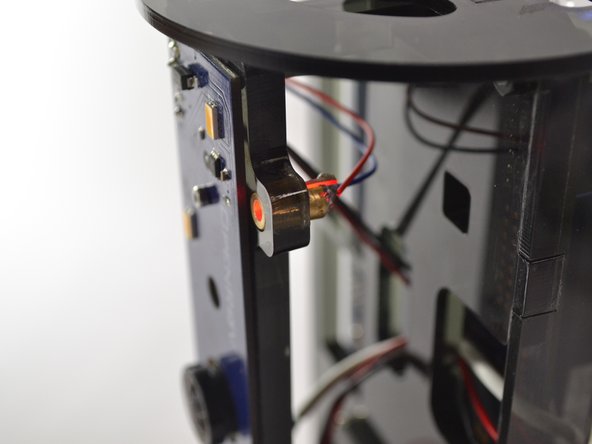
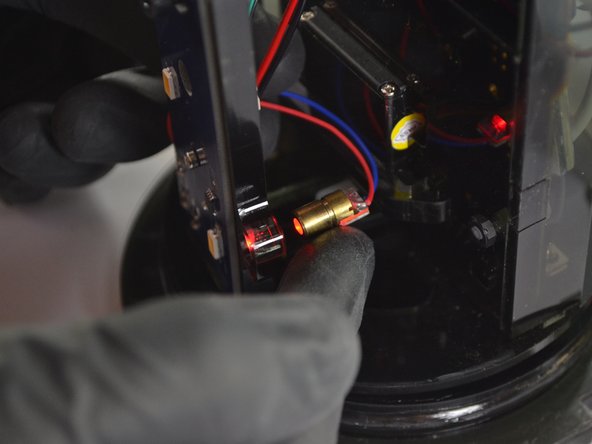
- 激光校准

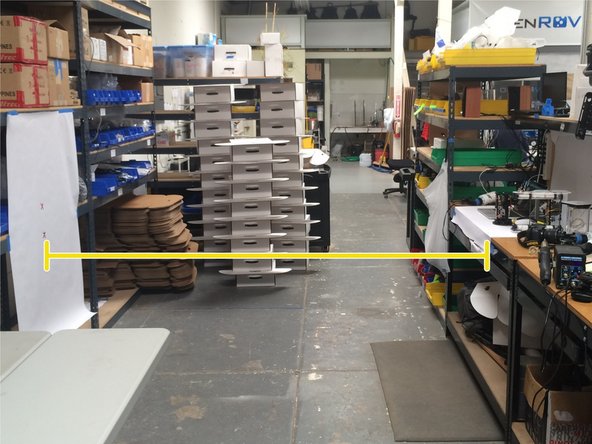
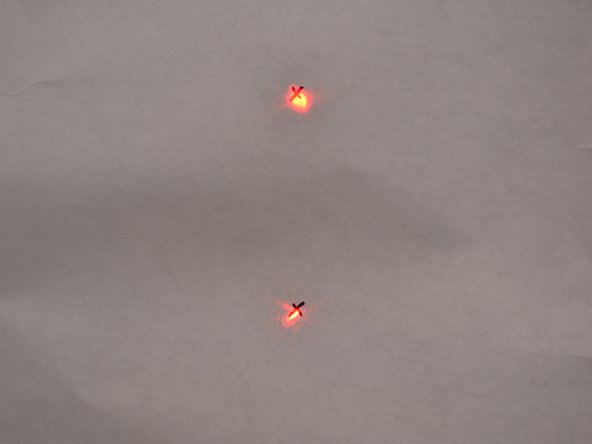
- 我们将要在ROV上安装两个激光器。这些激光束将相距10厘米并平行。当在水下打开时,这些点将始终保持10cm的间隔,作为水下测量的刻度。
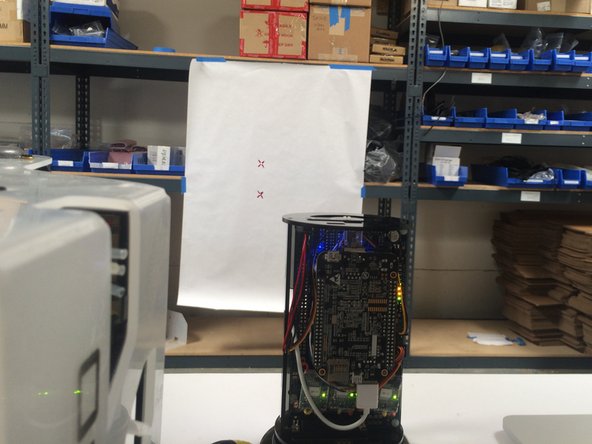
创建一个“激光校准站”(带有两个X的纸,它们在一条直线上相距10厘米)。

- 将校准表放置在距电子机箱激光器3-4米的位置,底部的X与遥控车上的激光距离地面的高度相同。
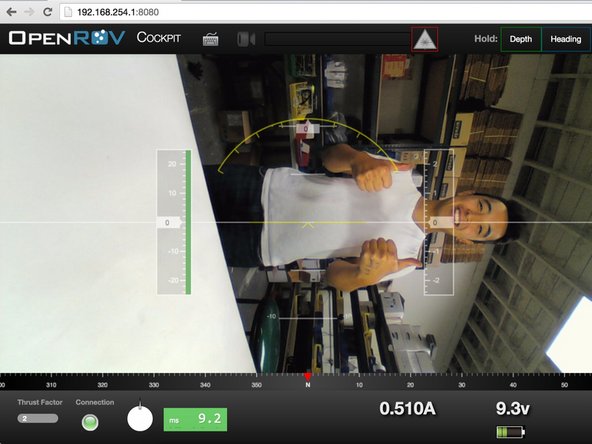
- 按下键盘上的“ L”以打开激光器。聚焦激光。未聚焦的激光。如果激光直接照射您的眼睛,可能会很危险。了解更多比你想要了解激光安全位置。
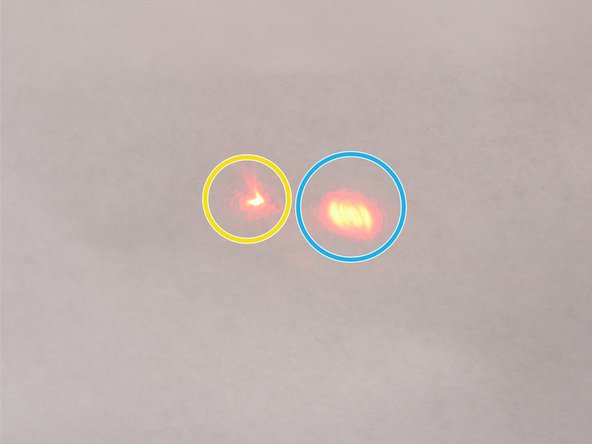
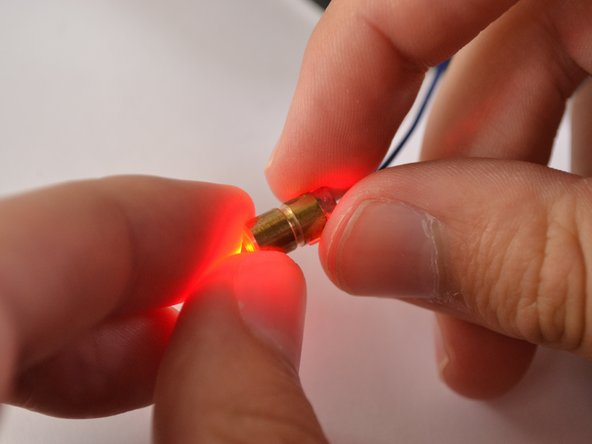
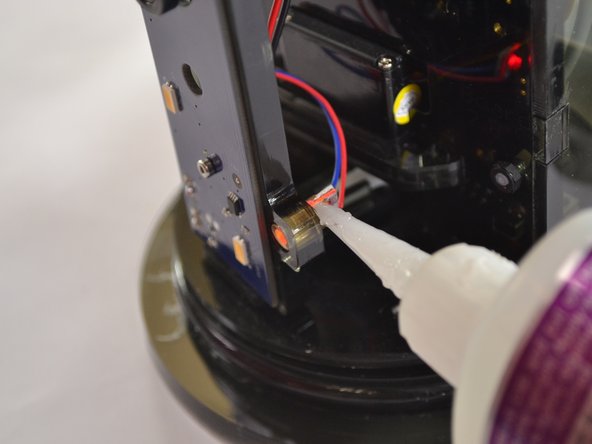
- 扭曲激光的前部以使其聚焦。

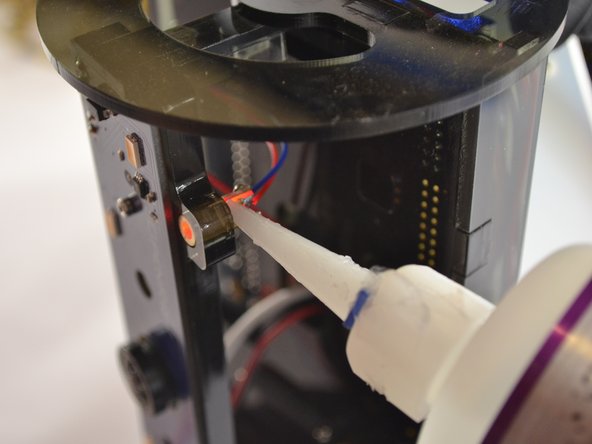
- 当使用氰基丙烯酸酯(强力胶)时,建议您戴上手套,安全眼镜并在通风的地方工作。

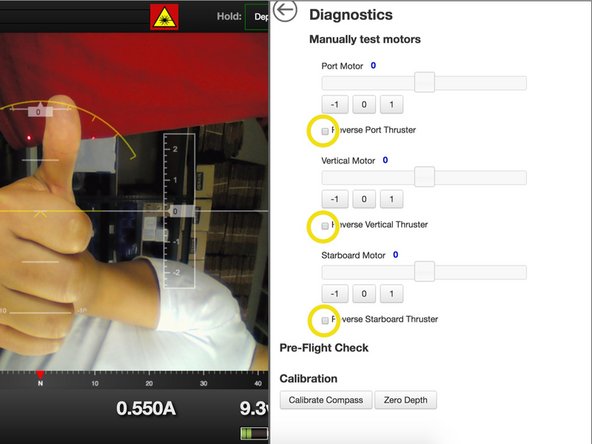
- 电机方向

- 测试以查看螺旋桨是否沿正确方向旋转。在座舱中,在查看电动机的同时按向上箭头以查看电动机的旋转方向。
端口应逆时针运行。
右舷应顺时针运行,
对于垂直支柱,当按下Ctrl按钮时,从顶部看时应该逆时针旋转。
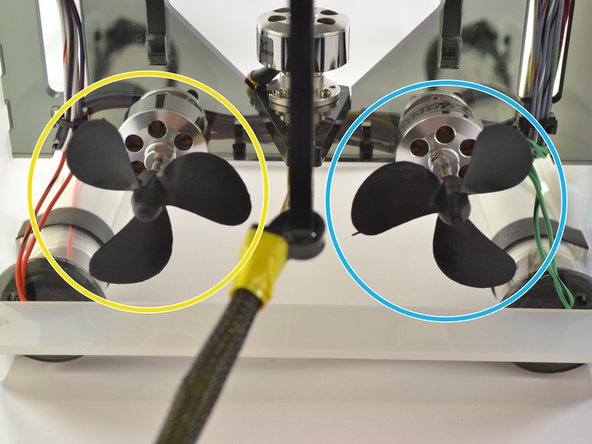
- 要反转电动机,请单击右上方的“诊断”选项卡。为需要切换的电机选择“反向”框。
- 电子管倒角
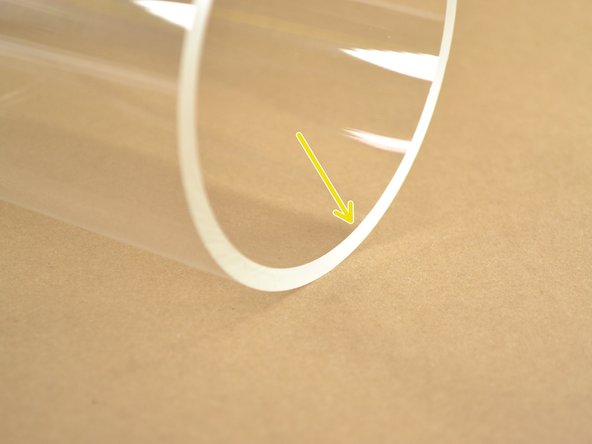
- 用中号砂纸打磨主管的内边缘,使O形圈适合管内,而不会因管内边缘的锋利度而受损。
完成后,擦去打磨过程中残留的所有灰尘。
请勿刮擦试管内部。这是O形圈密封的地方(请参见以下步骤)。
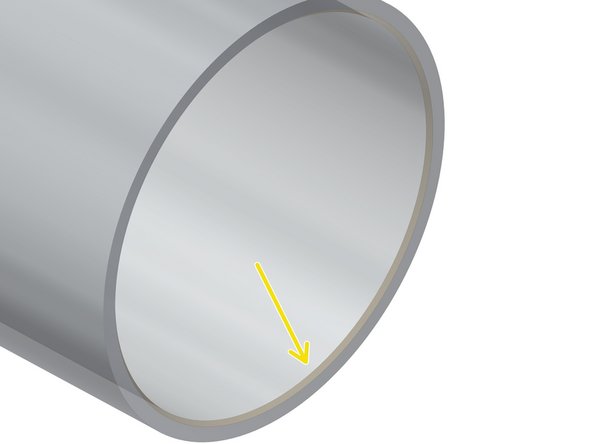
- 请勿刮擦试管内部。这是O形圈密封的地方。
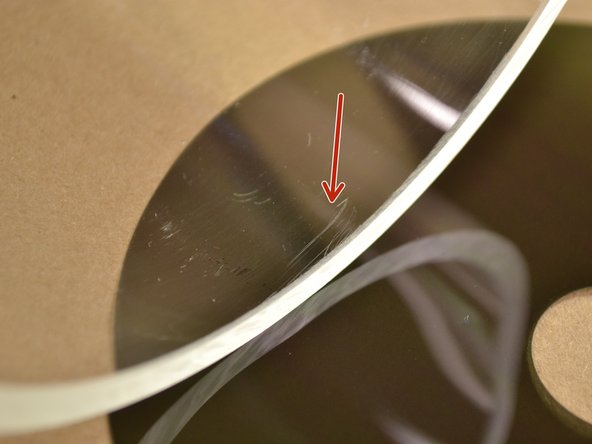

- 确保对管子的两侧进行倒角。

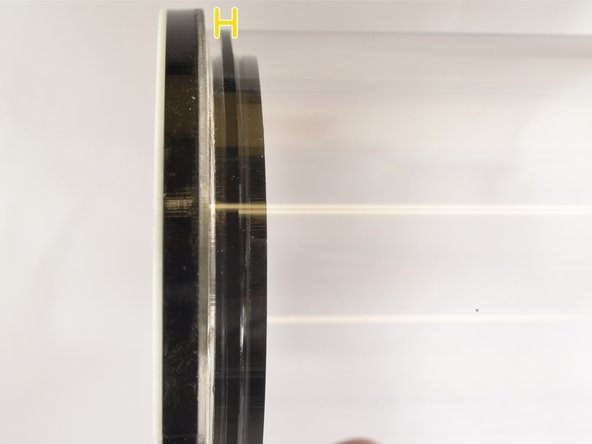
- 密封电子管




- O型圈密封对于确保电子设备保持干燥非常重要。安装完管子后,请确保O形圈沿管子的整个内周啮合。这是大量的O形圈啮合。


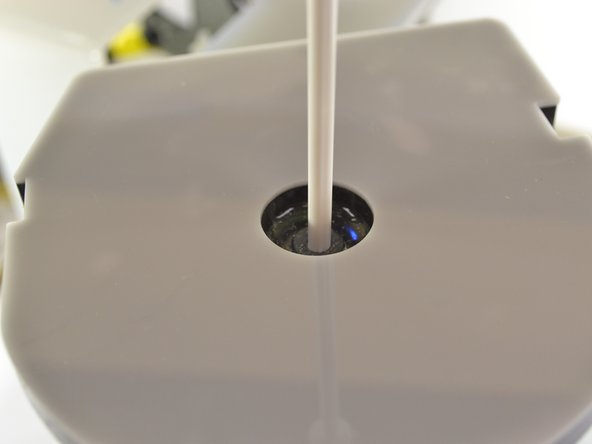
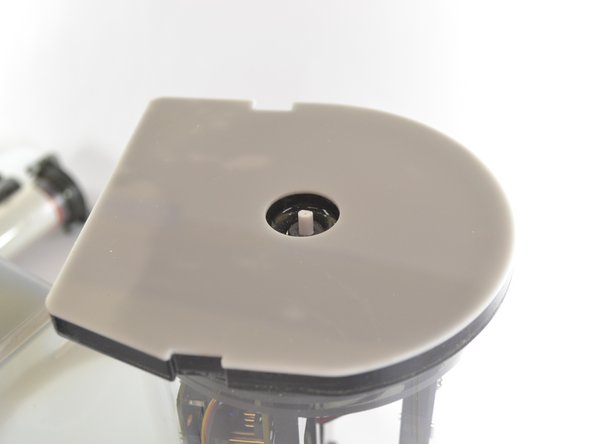
- 电子管需要由柱塞提供的通风孔,以便在戴上端盖时平衡压力。

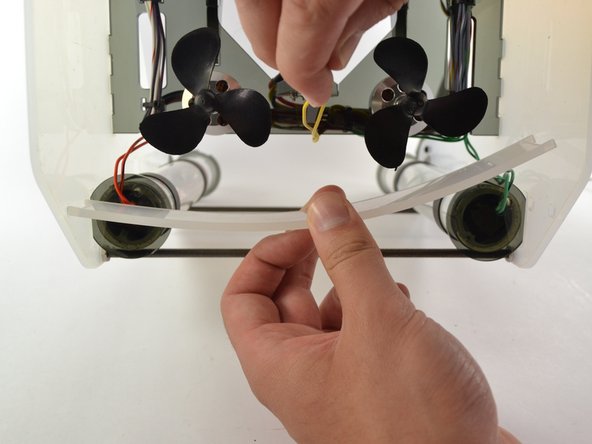
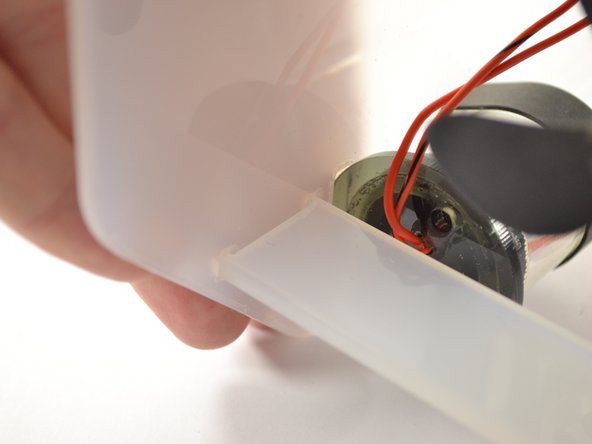
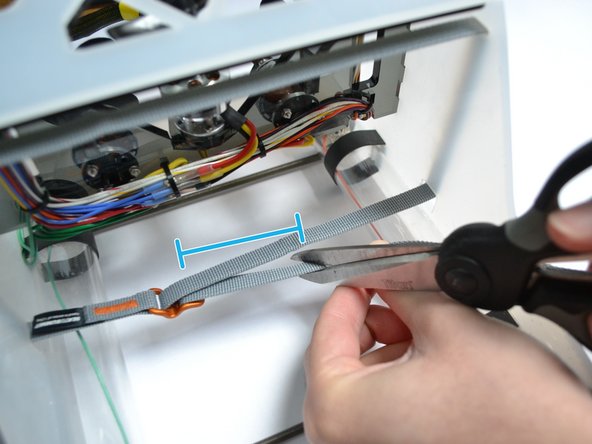
- 表带


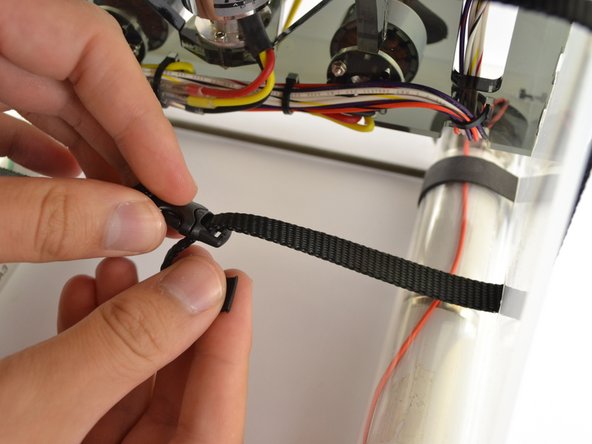

- 如果您有灰色皮带,请执行以下操作。
- 从带扣上剪下约7厘米。
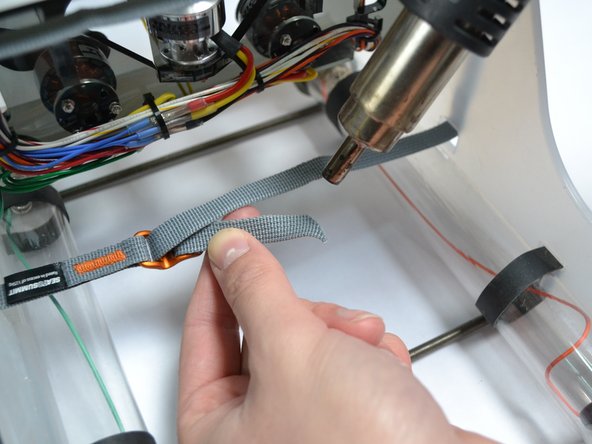
- 使用热风枪熔化末端,以免磨损。
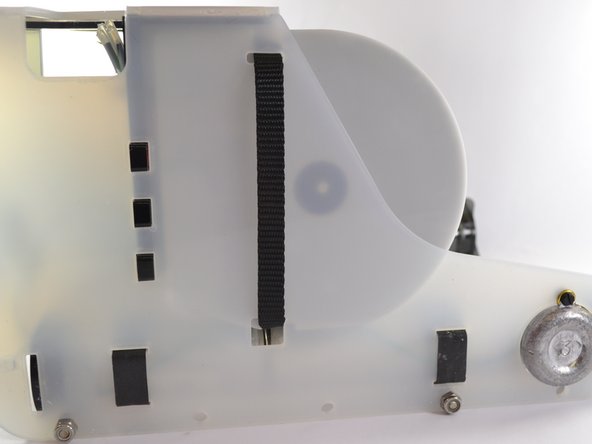

- ROV完成

获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号