



















OpenROV入门教程-布线
说明:
- 介绍OpenROV如何布线
步骤:
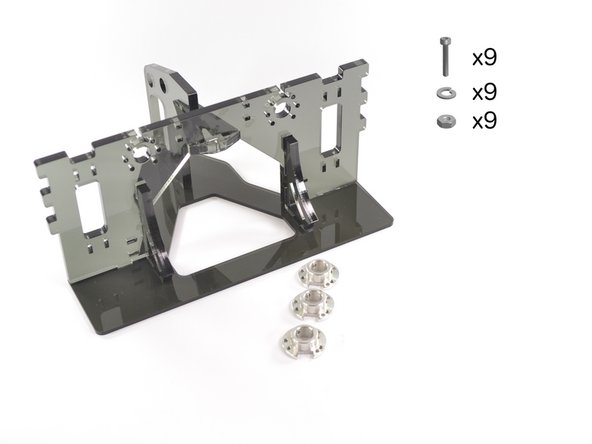
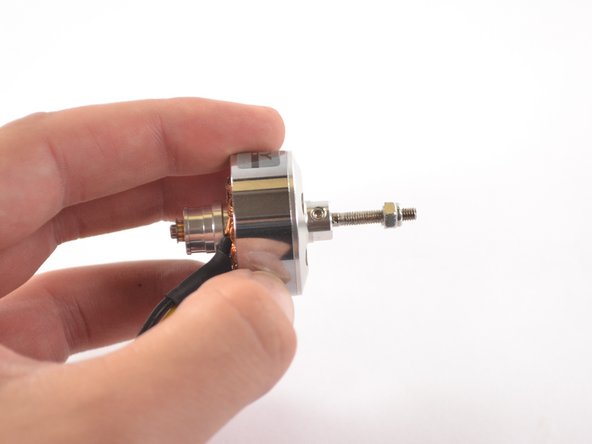
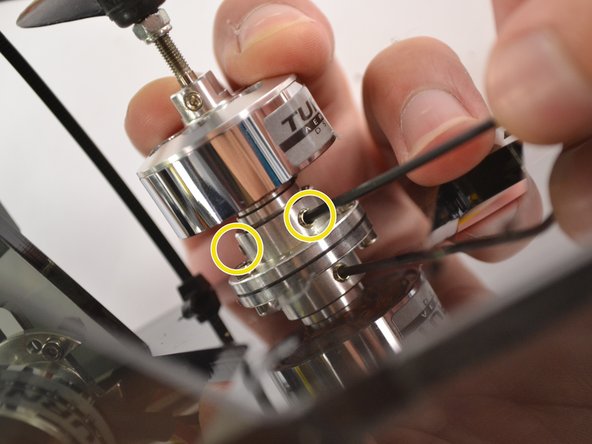
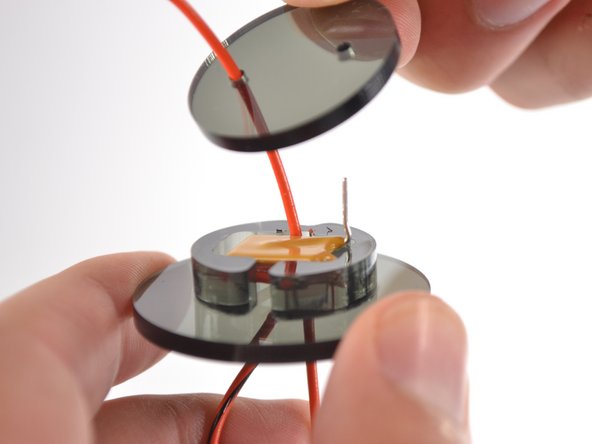
- 电机安装座

- 松开这两个固定螺钉,但不要完全卸下它们。从电动机上卸下安装座。
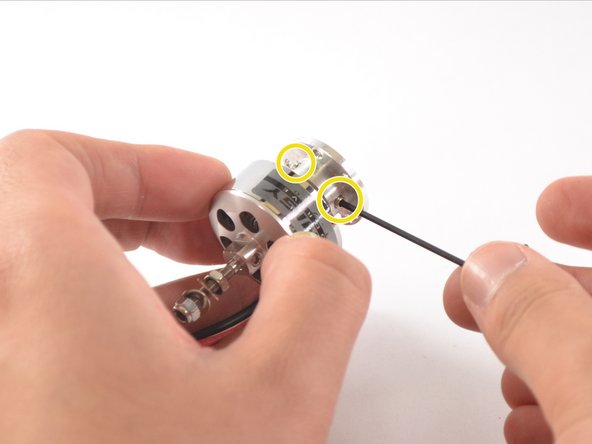
- 对于本节,如果掉落螺钉或螺母,用纸巾或布擦拭将很有帮助。
- 请注意,安装座中的槽口在图片中朝上。
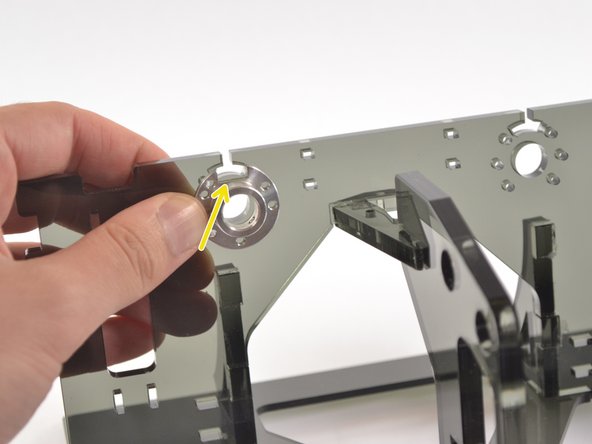
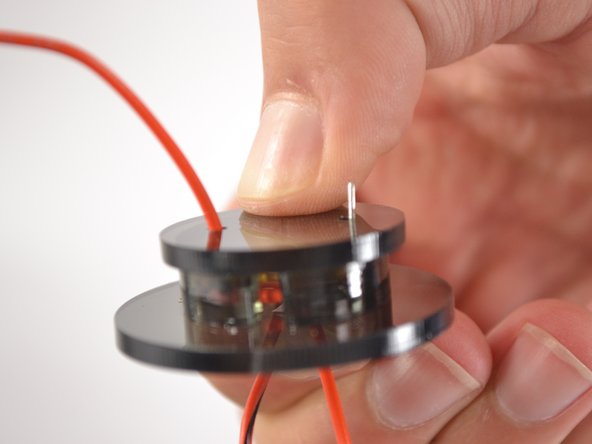
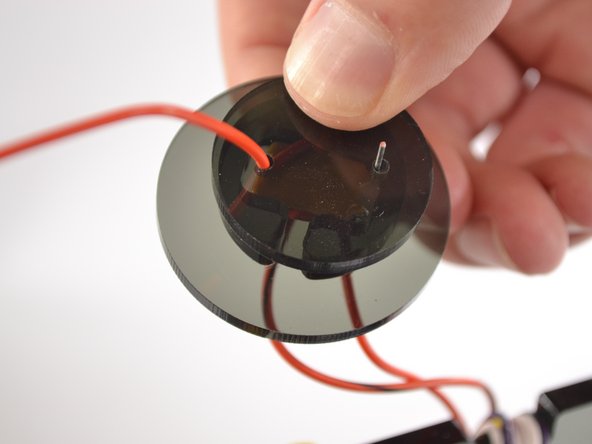
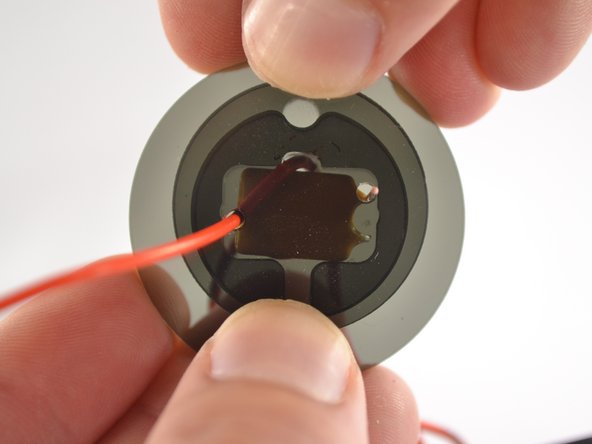
- 确保在螺母后面放一个锁紧垫圈。只有三个螺孔对齐。
- 注意缺口在哪一侧。


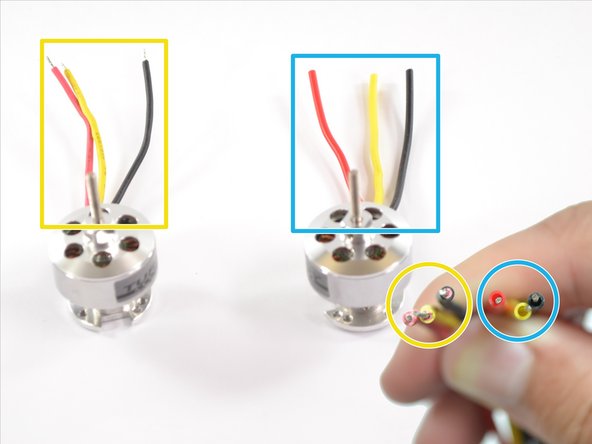
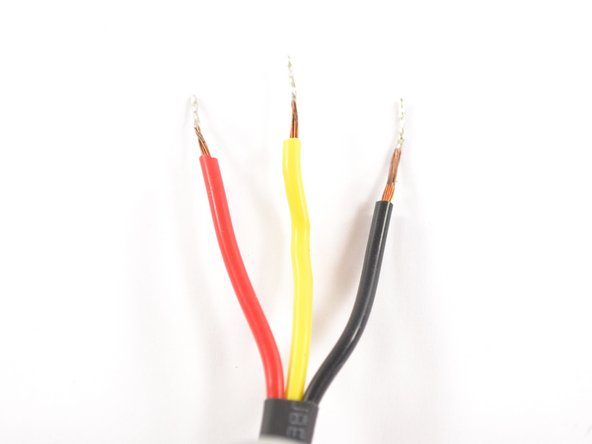
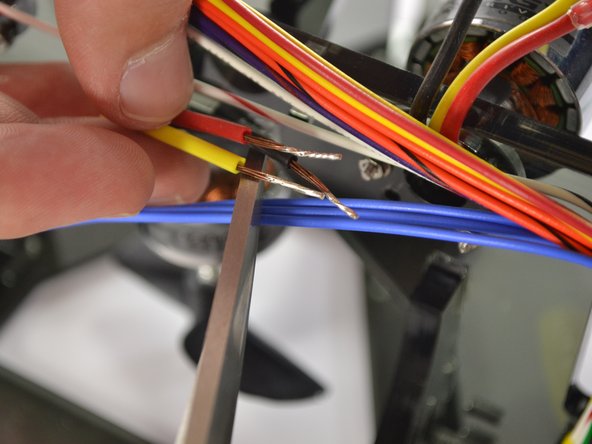
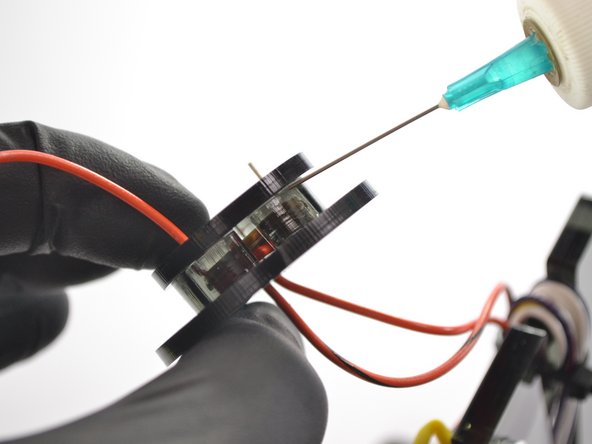
- 电机上有两种不同类型的绝缘。您可能会同时使用这两种类型,因此请检查每个电动机。第一种在绝缘上有文字并在内部密封。无需进一步的准备工作。跳至“安装螺旋桨”部分。第二种类型在绝缘层上没有文字,内部也没有密封。为了确保防水连接,必须完成一些准备步骤。
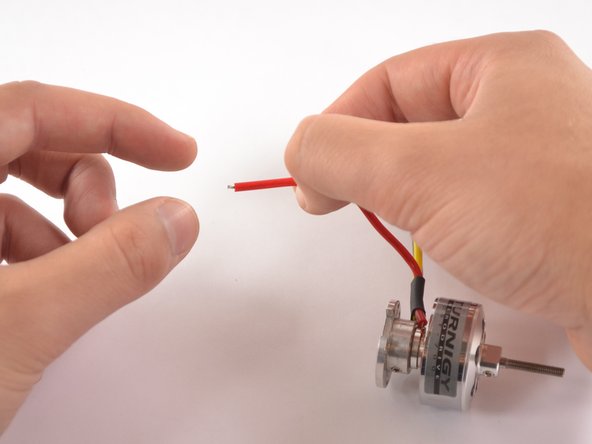
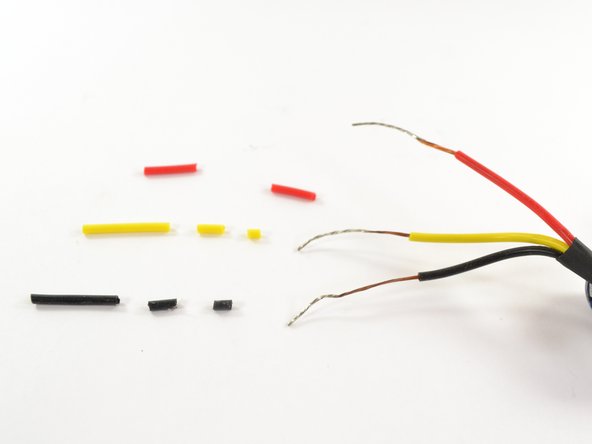
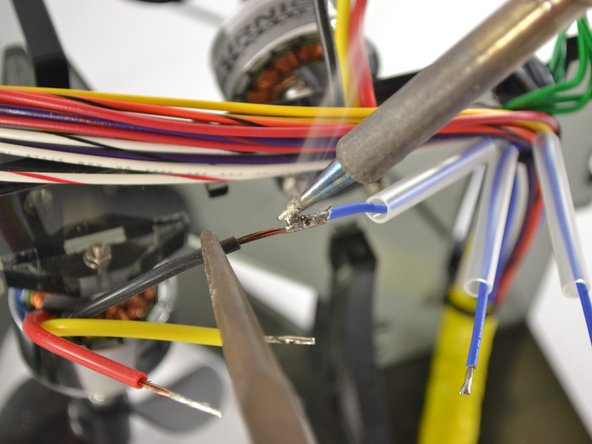
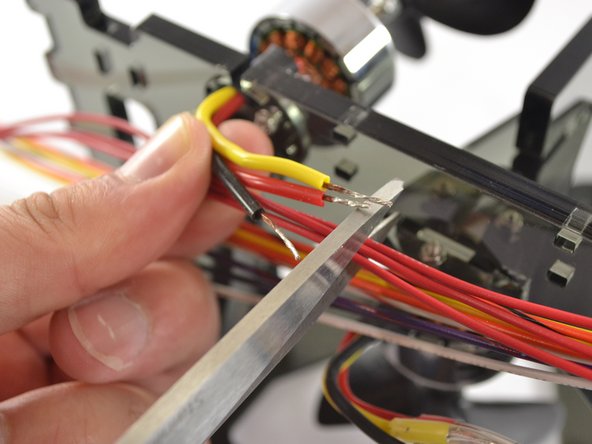
- 使用指甲可以一次去除一点绝缘层。您需要去除足够多的东西才能暴露出牙釉质。
- 镀锡的铜线(颜色为银色)。远离水是不安全的。裸线(紫铜线)。也不安全。漆包线(光亮,湿润的铜线)。远离水。
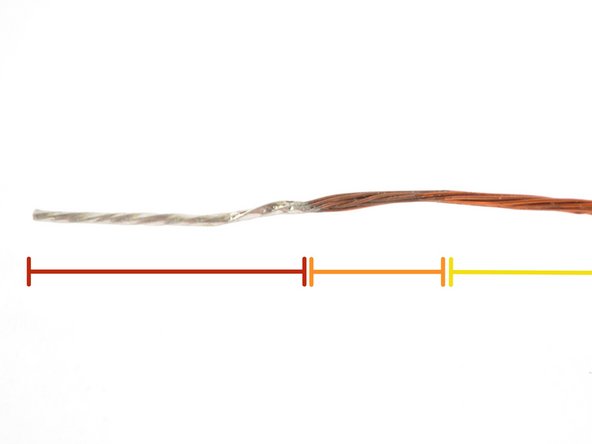
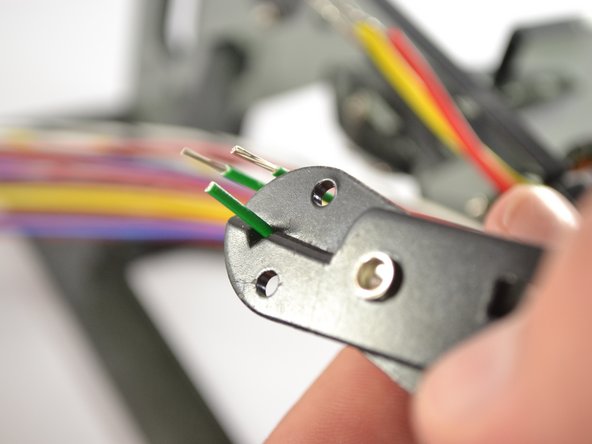
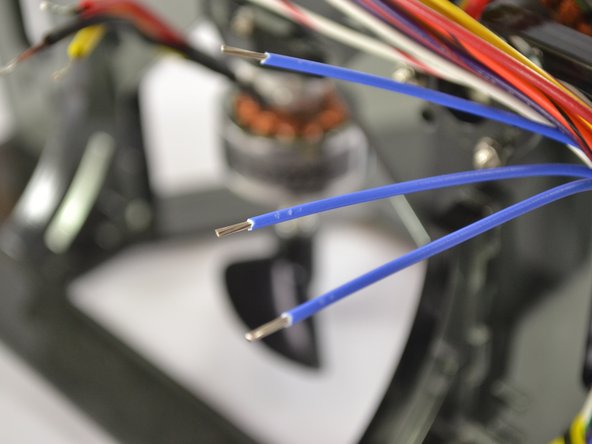
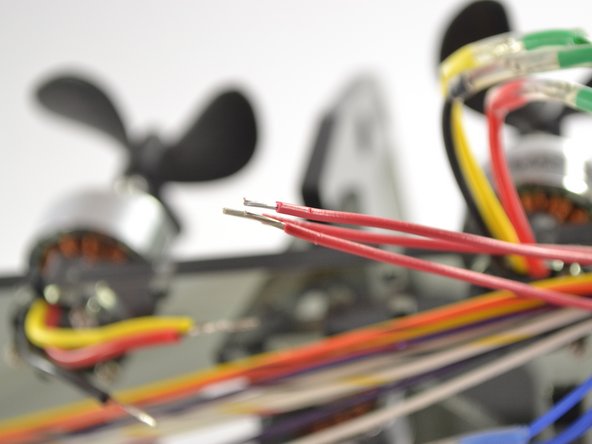
- 剥去绝缘层,直到您看到每条电线的搪瓷涂层。您必须剥离的数量会有所不同。
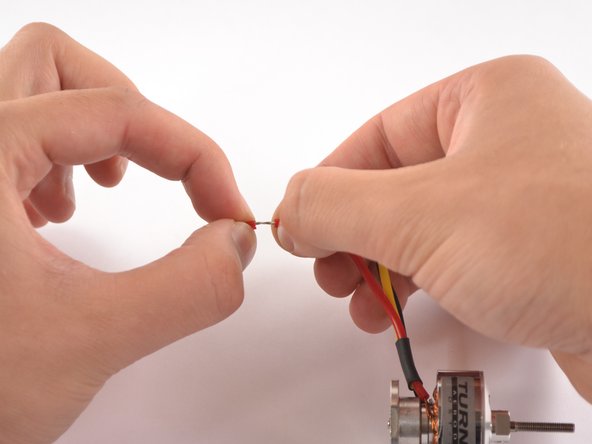
- 剪掉一些镀锡线,但不能全部剪掉。
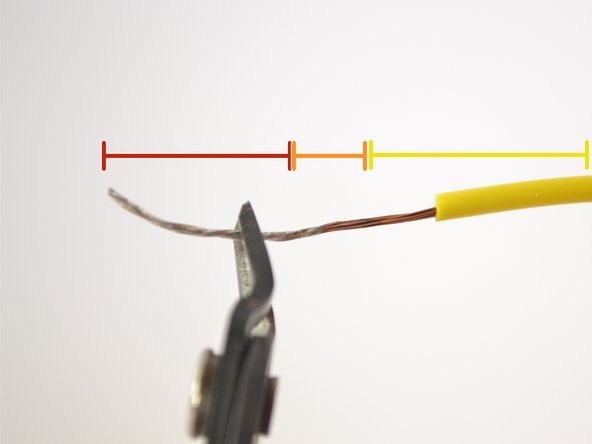
- 对于所有三根电线以及所有此类电动机,请完成此过程。

- 安装螺旋桨

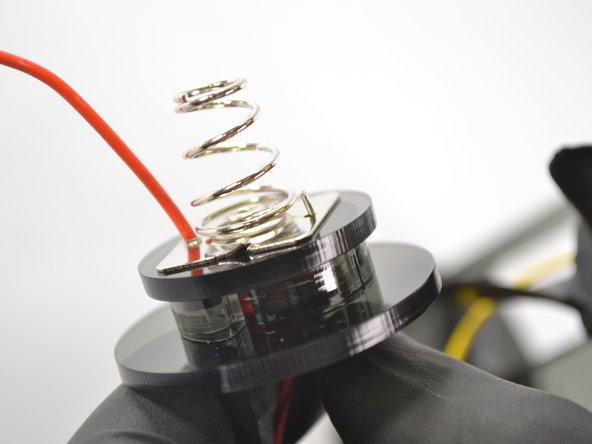
- 从所有三个马达罩上的螺杆上拆下现有的螺母和垫圈。使用一套钳子,将防松螺母(带有尼龙插入件)固定不动,并旋转马达罩以拧紧螺母,直到螺母从另一侧伸出。
- 取下螺母,然后将其放回原位,首先放在尼龙一侧。

- 紧紧地拧紧螺旋桨。

- 一只手握住铃铛,将防松螺母靠在螺旋桨上。紧紧地拧紧它。

- 完成所有三个电机。请注意,有三种不同类型的螺旋桨。

- 布线1
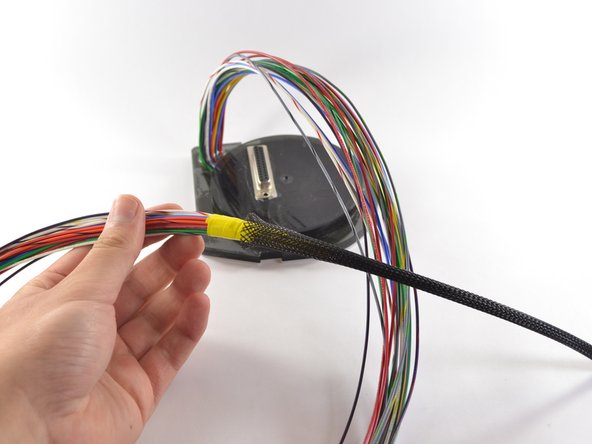
- 使用框架的长度来测量网格覆盖物的长度。保留多余的部分,以备日后使用。


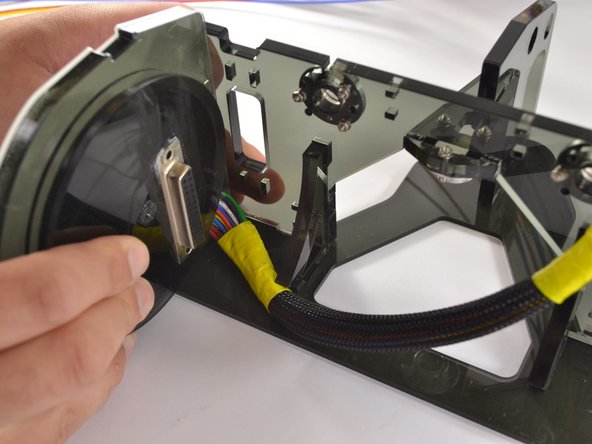
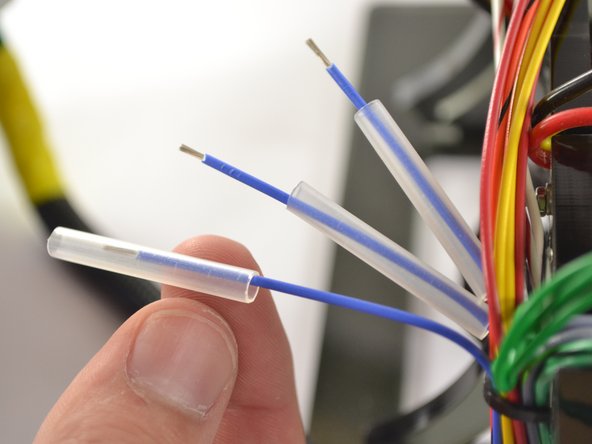
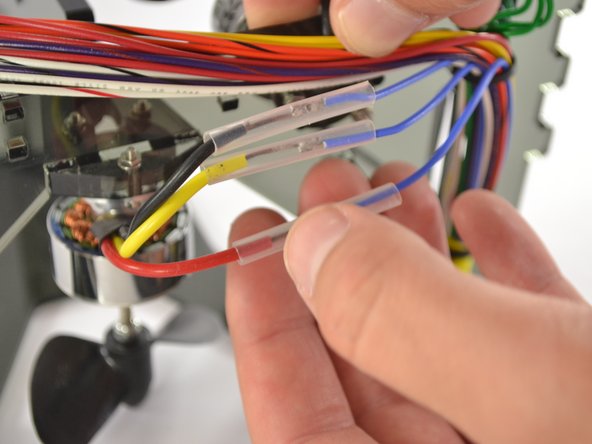
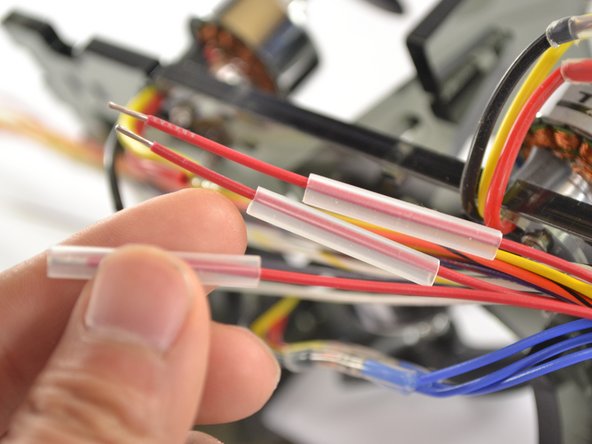
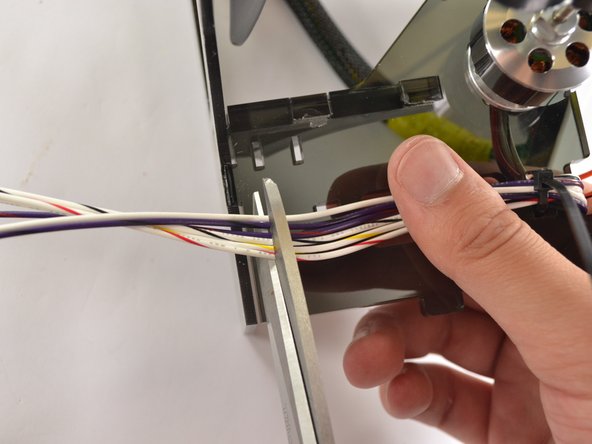
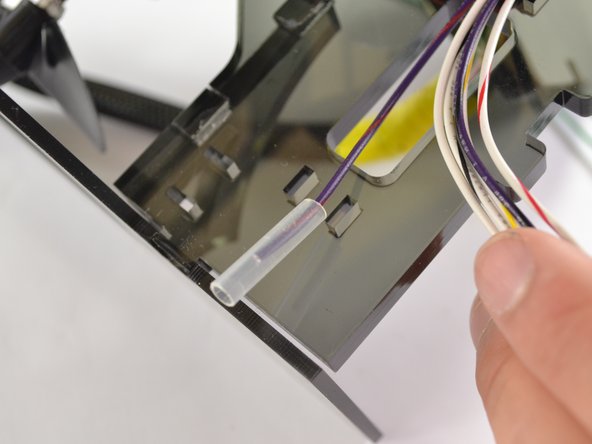
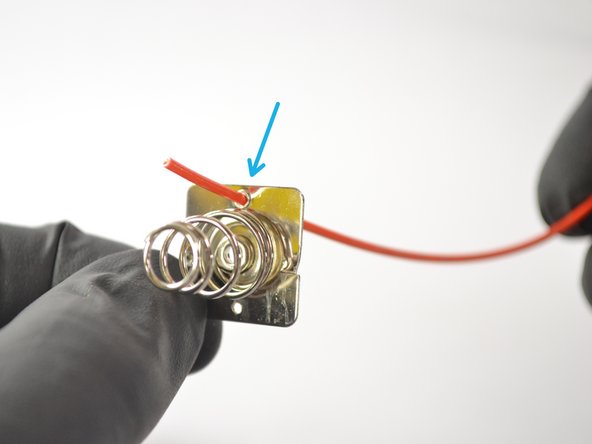
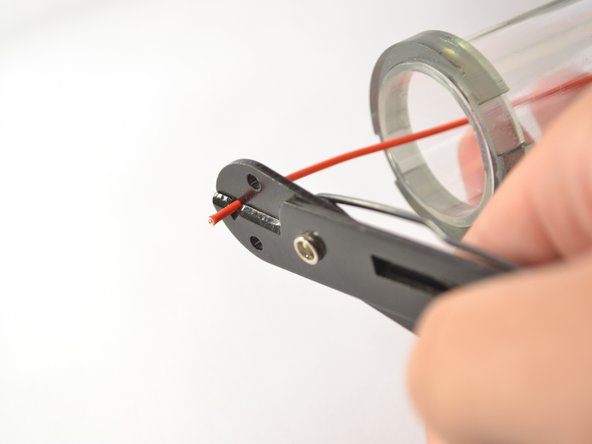
- 将套管一直推到电线上,并朝端盖方向推。
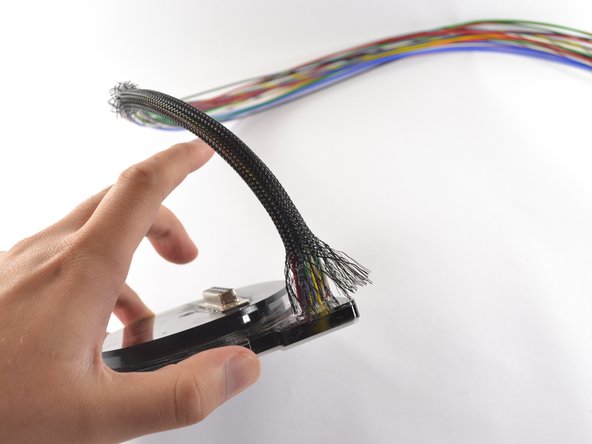
- 用胶带覆盖磨损的一端,然后将网保持在适当的位置。

- 撕下导线末端的胶带。
- 向上拉伸网格,然后用胶带将另一侧固定到位。

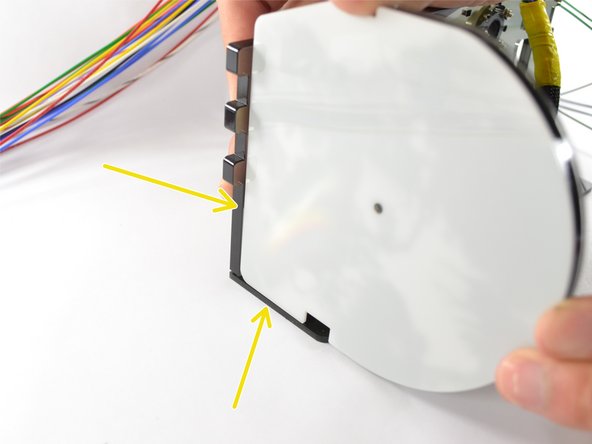
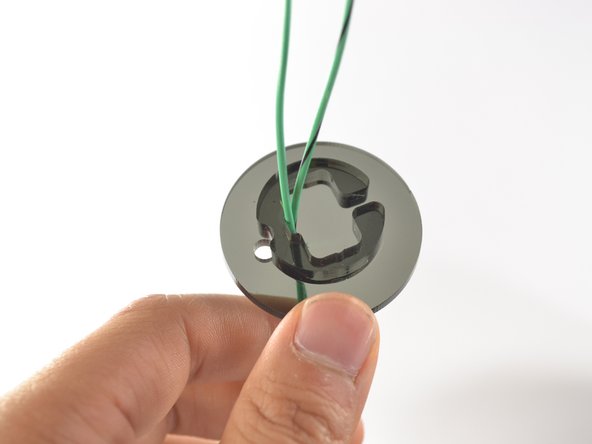
- 端盖的平坦侧面应抵靠主体结构。
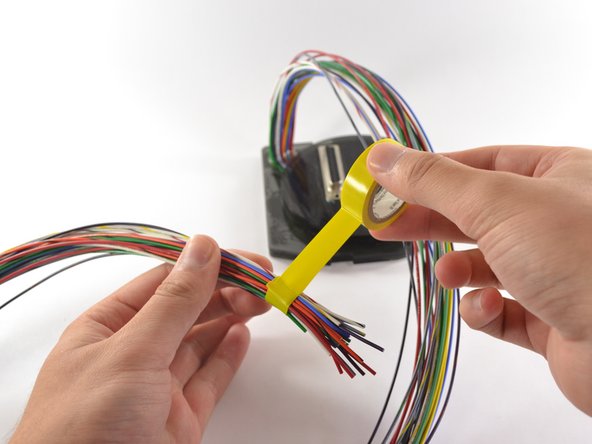
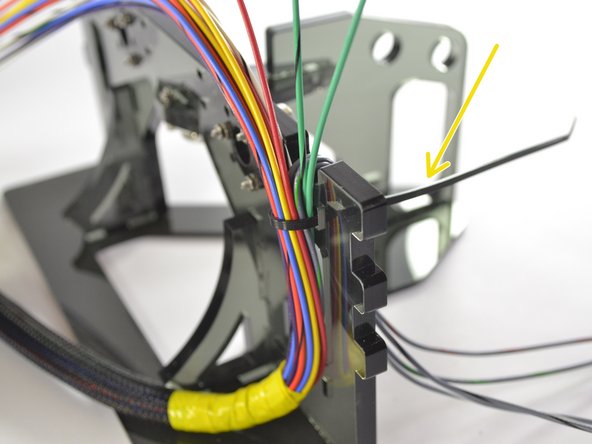
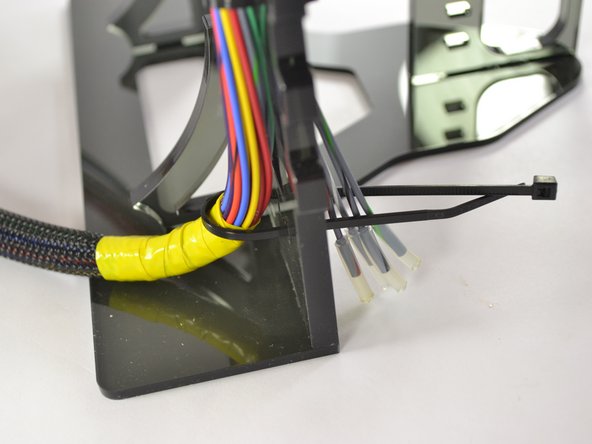
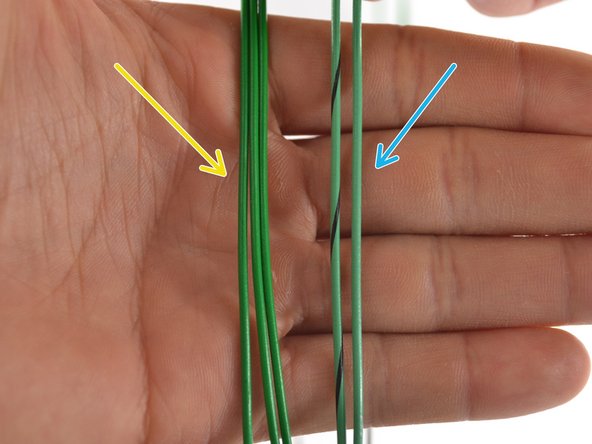
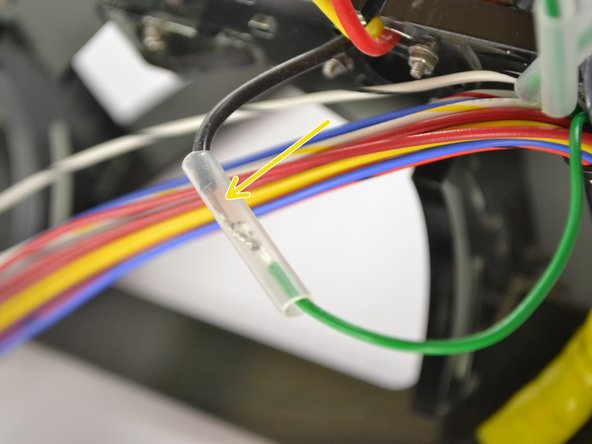
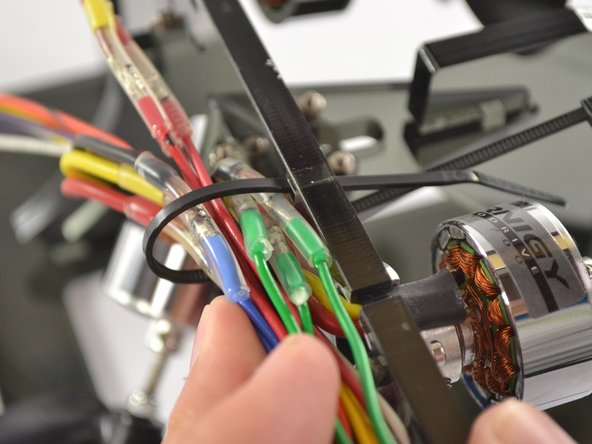
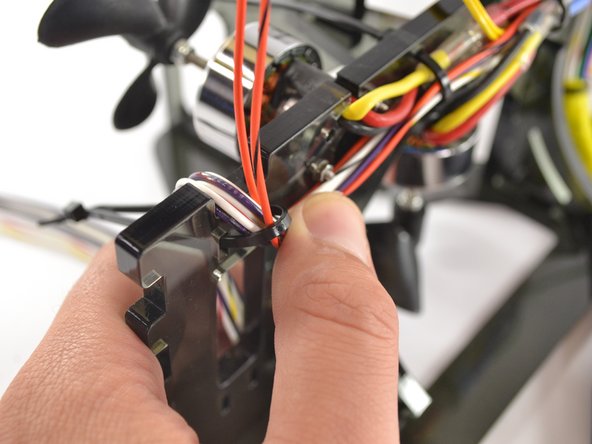
- 分离出这些电线。
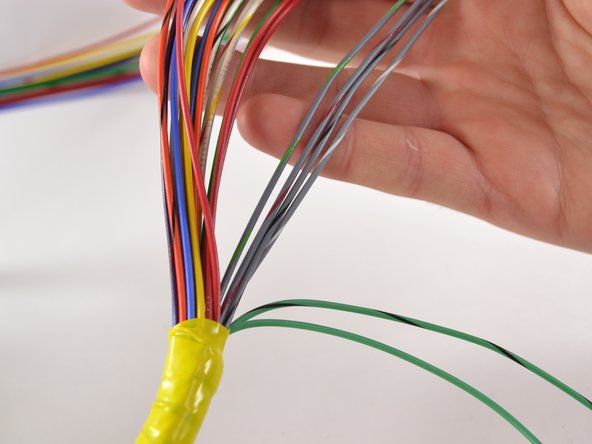
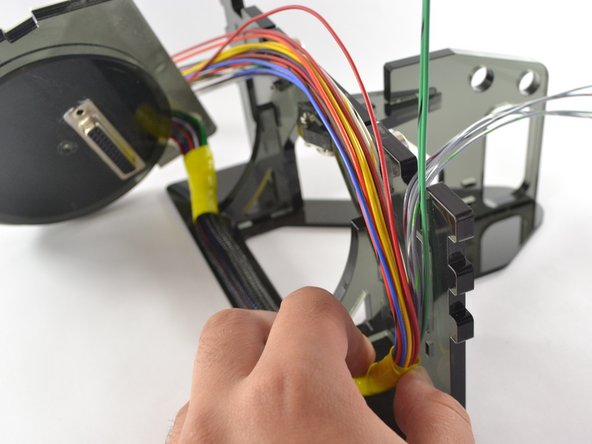
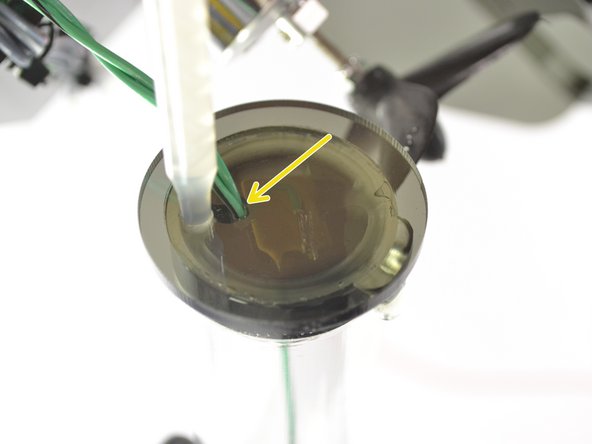
- 线束朝框架的中间方向移动。浅绿色的电线一直往上走。
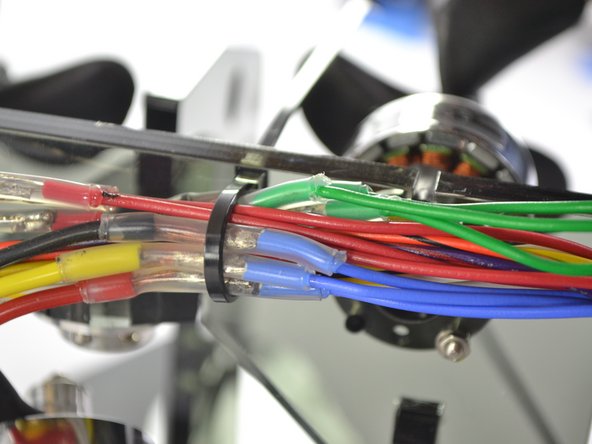
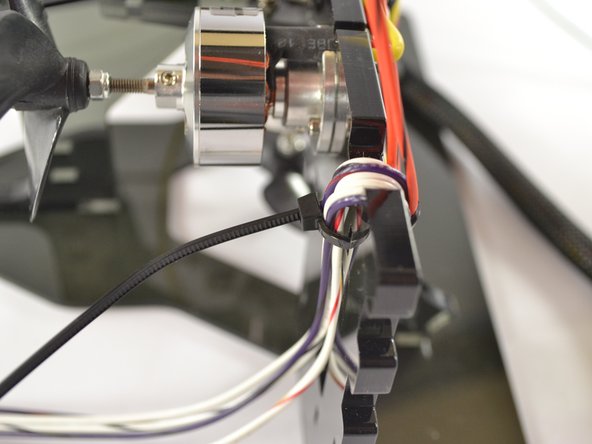
- 收紧拉链。


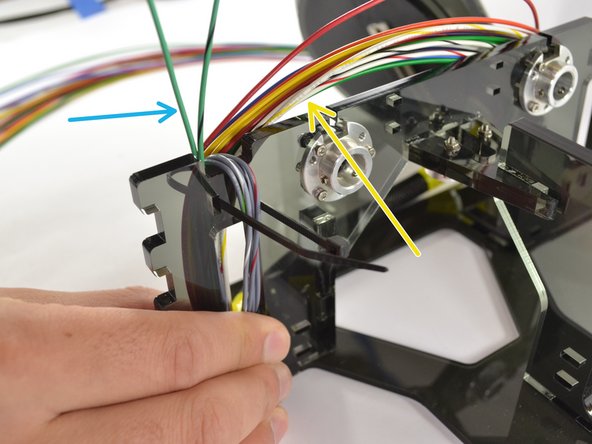
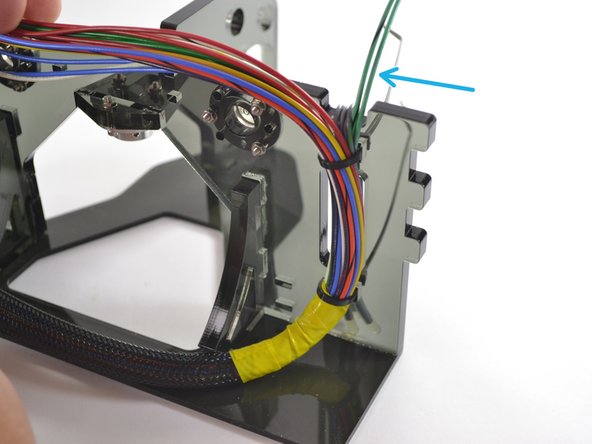
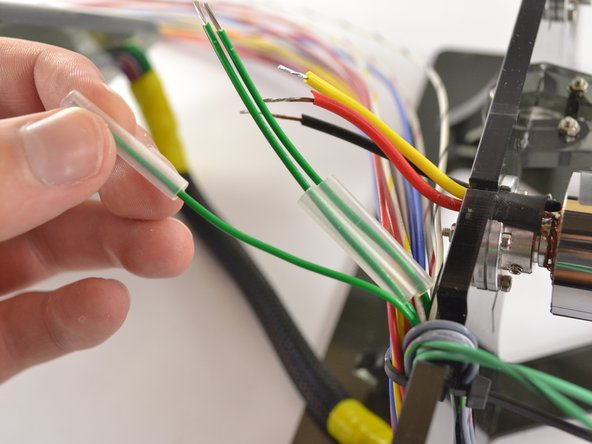
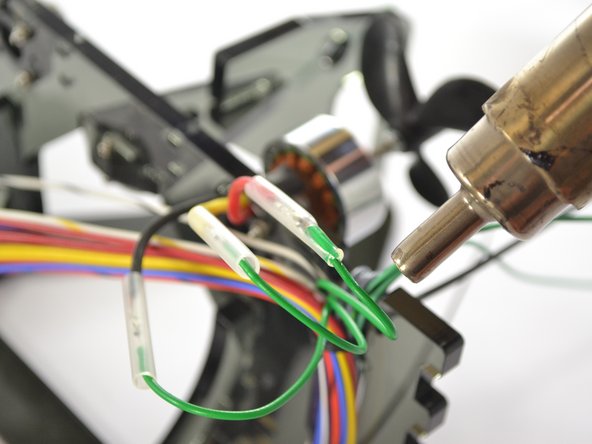
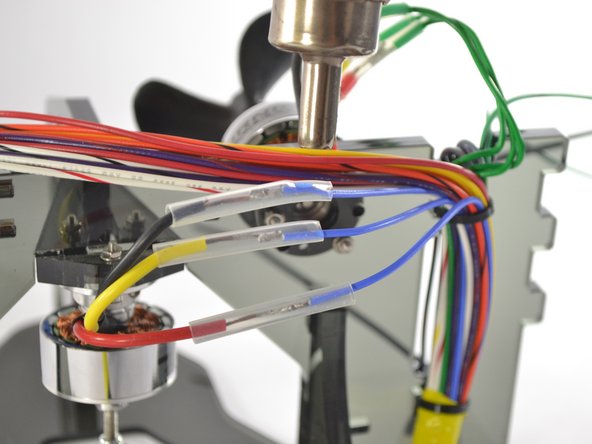
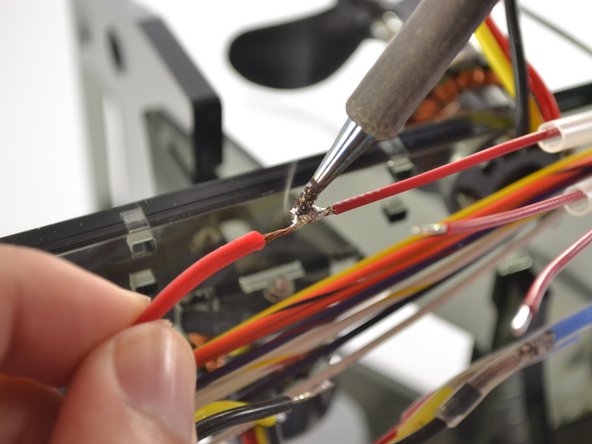
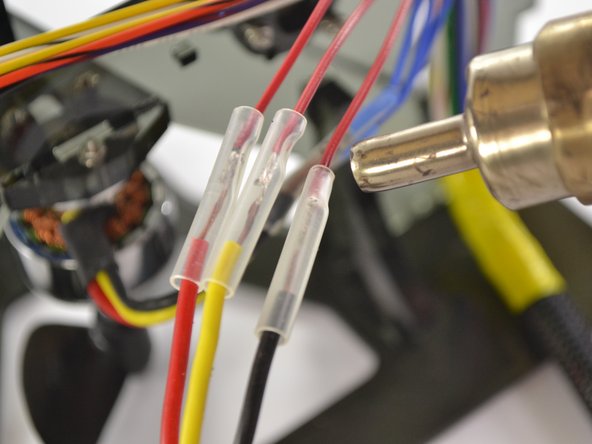
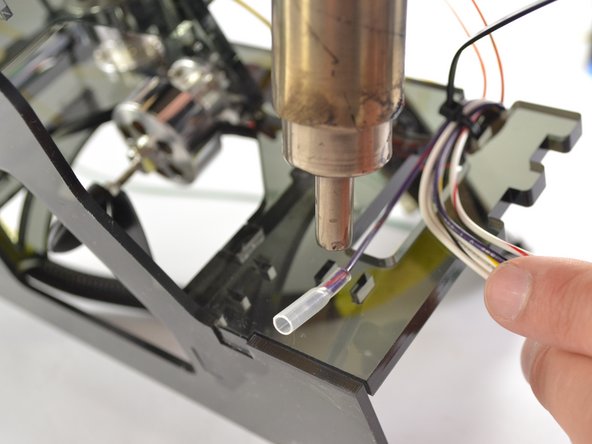
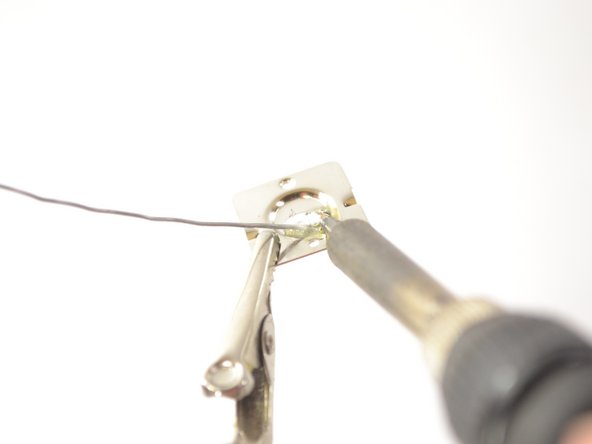
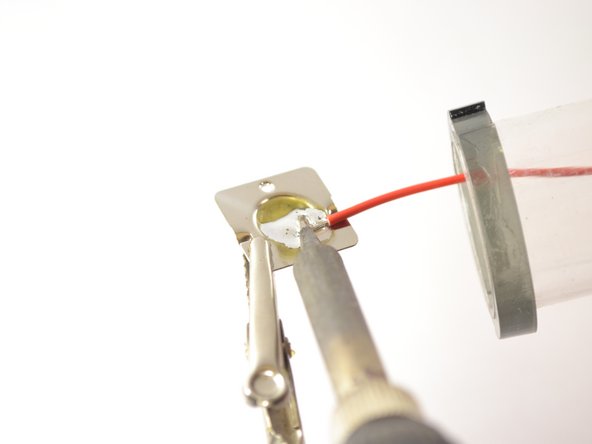
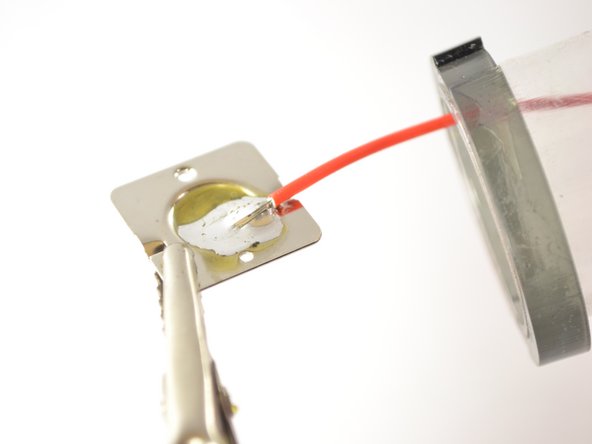
- 确保完全融化热缩,以使内部的粘合剂完全融化并从两端散出。这4条线是I2C线,用于将外部传感器(包括我们的IMU /深度传感器)连接到您的ROV 。最后的热收缩是为了保护电线免受水的影响,直到您需要使用它们为止。
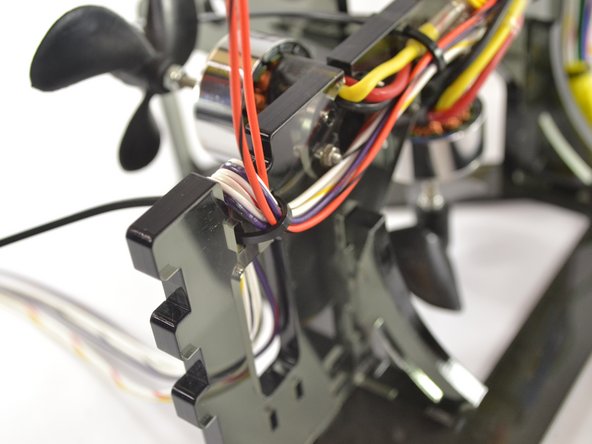
- 浅绿色的电线直接上升。
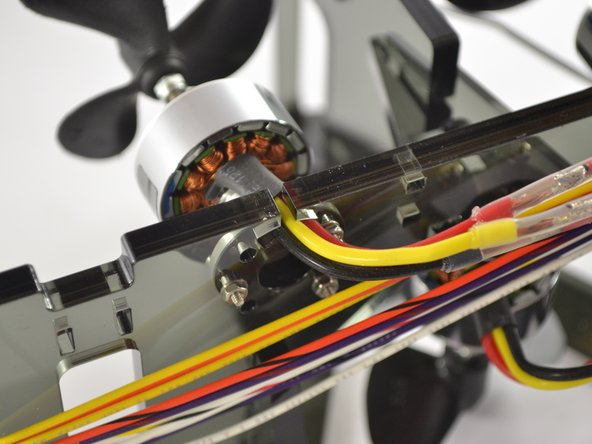
- 右舷马达
- 水平螺旋桨是反向旋转的,因此每个螺距的螺距都在不同的方向上。确保抓住正确的电动机。螺距不同的原因是保持车辆直行而不偏向一侧。
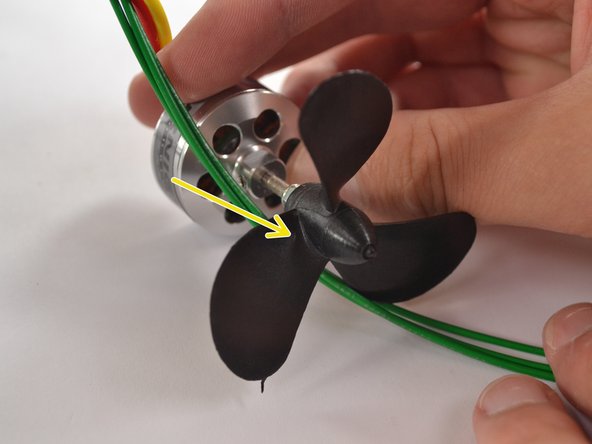
- 绿线有两种不同的阴影。电机线(3倍)。电池导线(2根)。
- 电机的三根电线将穿过ROV框架。
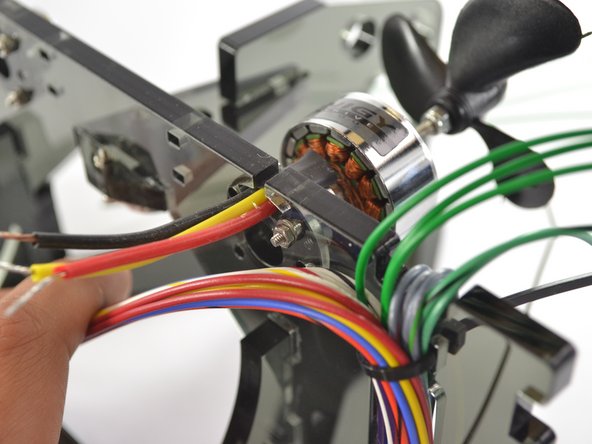

- 电动机的彩色电线与DB-25连接器的绿色电线无关。

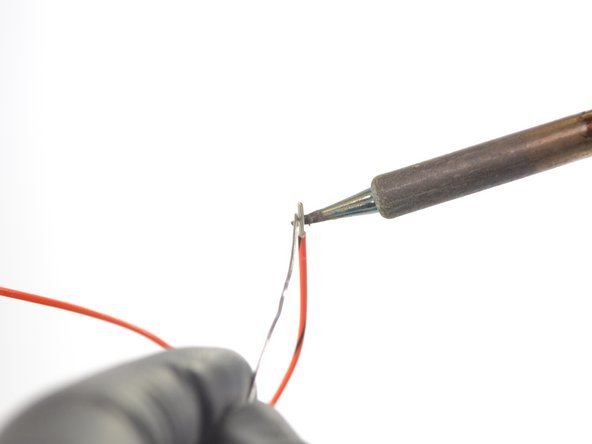
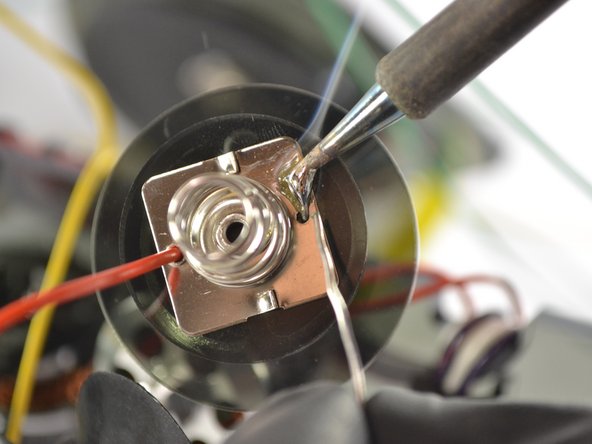
- 请注意,搪瓷正在显示。
- 确保内衬完全融化并渗出每个末端。
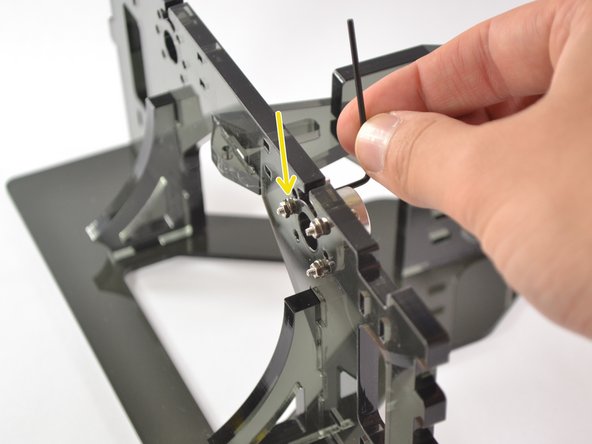
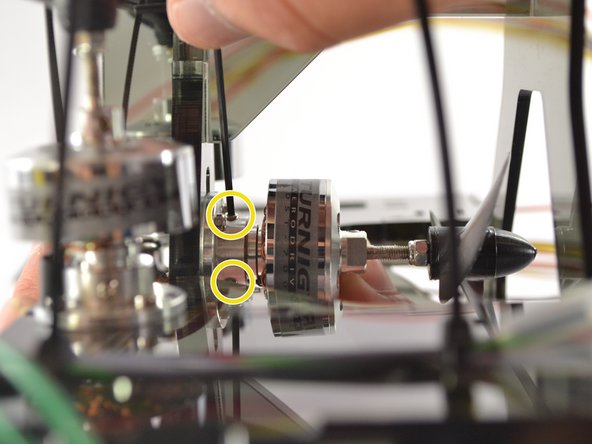
- 确保拧紧两个螺丝。

- 立式电机
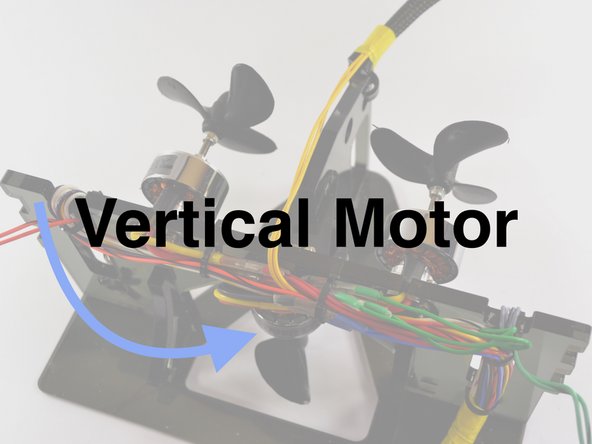
- 电动机的彩色电线与DB-25连接器的蓝色电线无关。

- 确保拧紧两个螺丝。
- 端口马达
- 注意螺旋桨的俯仰方向。水平螺旋桨是反向旋转的,因此每个螺距的螺距都在不同的方向上。

- 电动机的彩色电线与DB-25的红色电线无关。
- 确保拧紧两个螺丝。
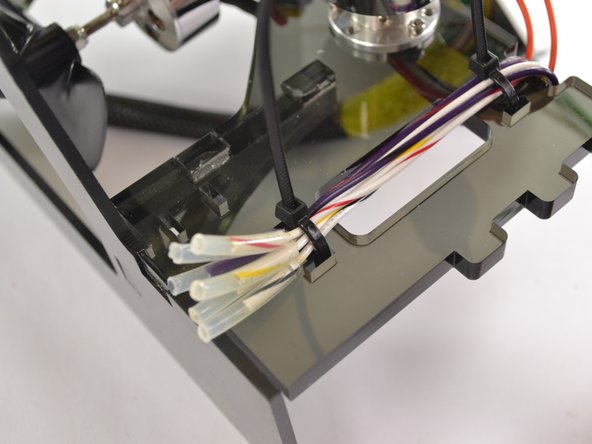
- 使用拉链固定所有电线。
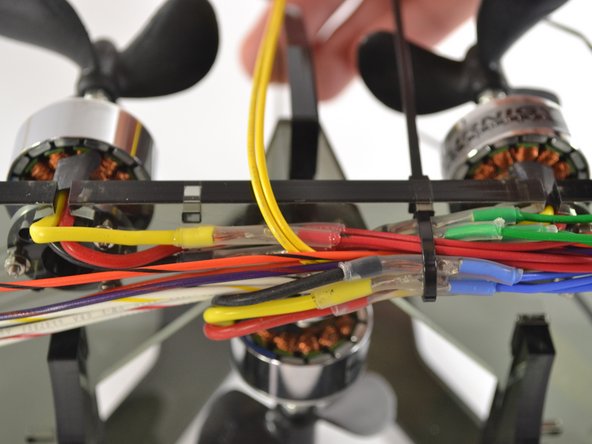

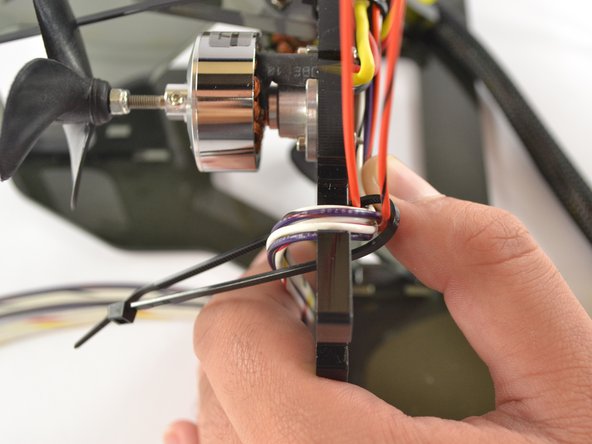
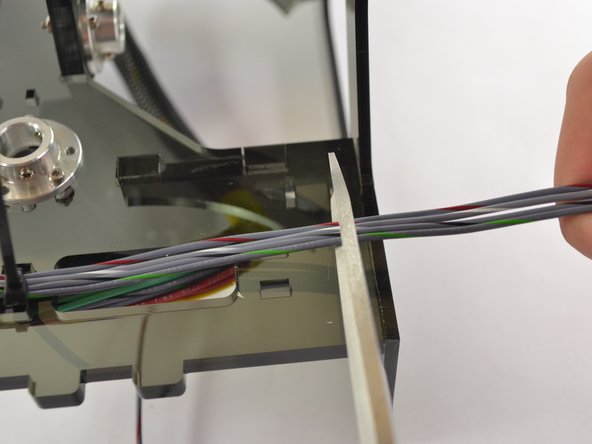
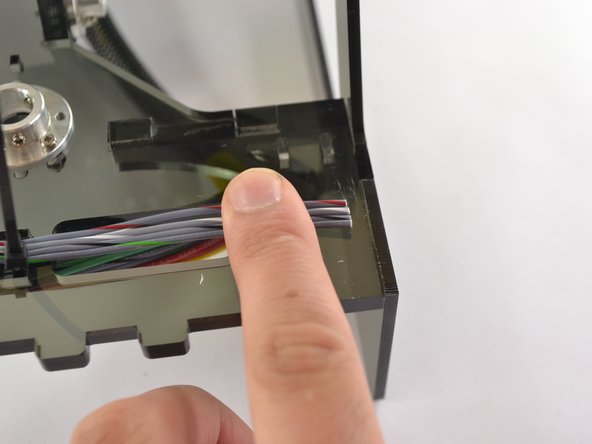
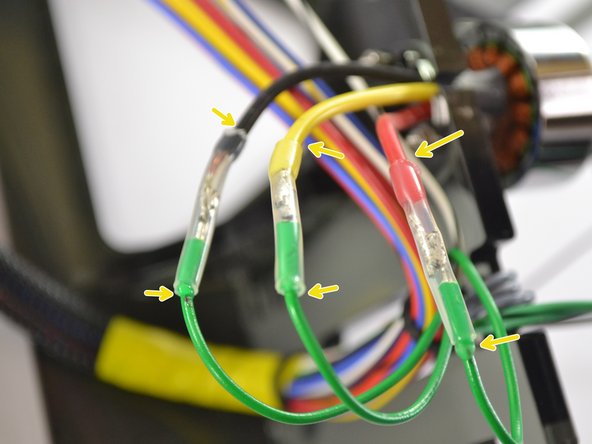
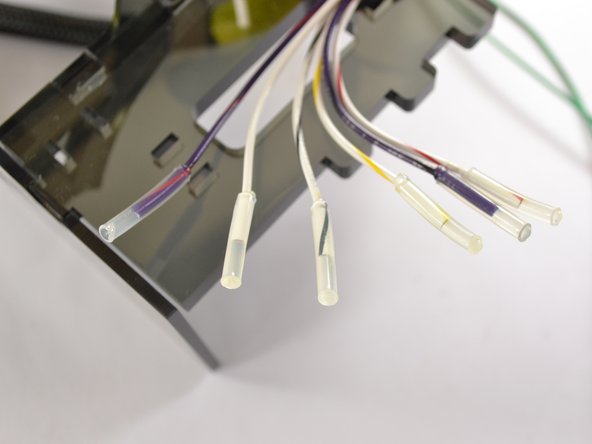
- 此侧应有6条辅助线。确保只有6条电线。

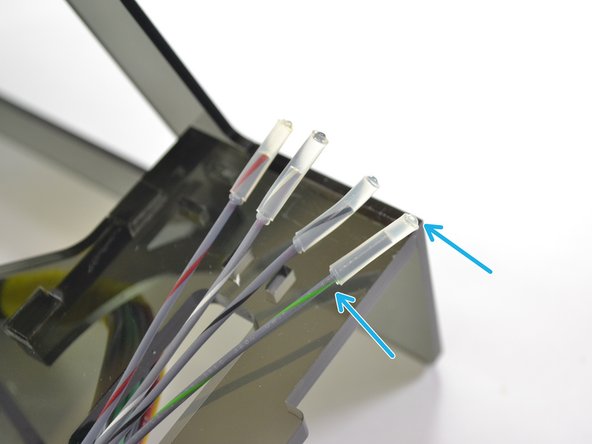
- 确保完全融化热缩,以使内部的粘合剂完全融化并从两端散出。这些辅助线用于将外部组件连接到ROV。紫色线连接到电源PWM通道。带条纹的白线连接到伺服通道。普通白线可以由用户定义。最后的热收缩是为了保护电线免受水的影响,直到您需要使用它们为止。
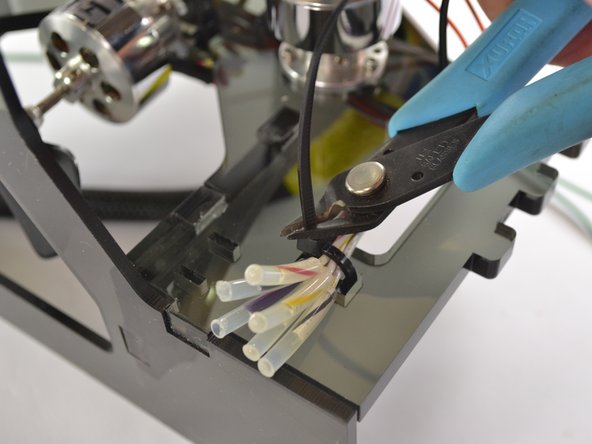
- 剪掉拉链的末端。共有6个。
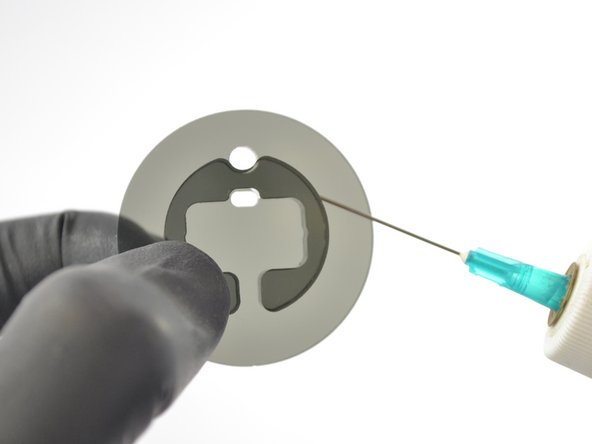
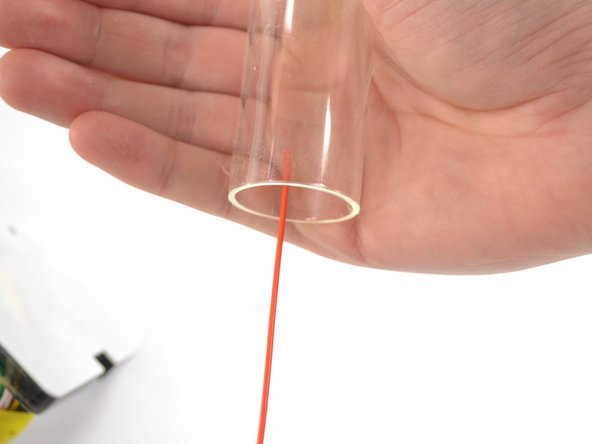
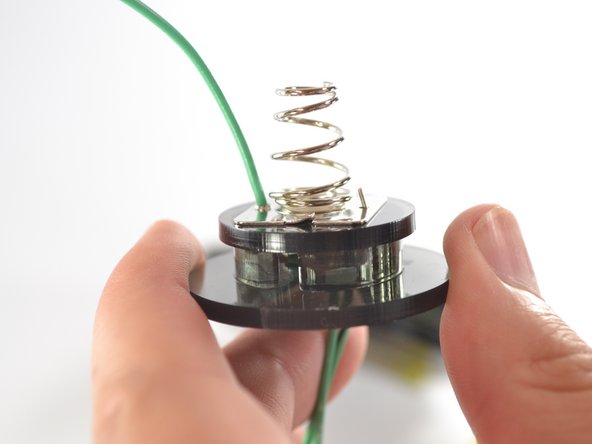
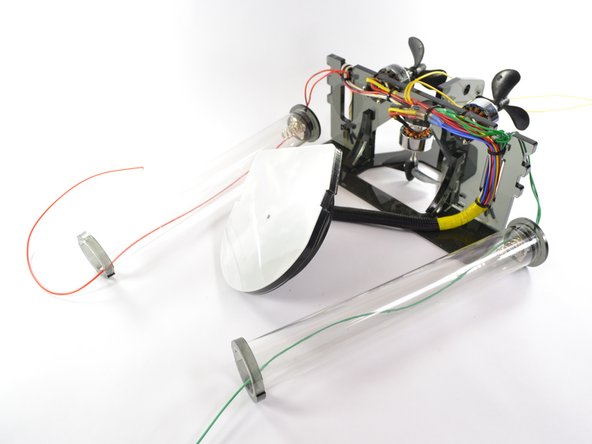
- 电池管的准备

- 剥下纸衬。

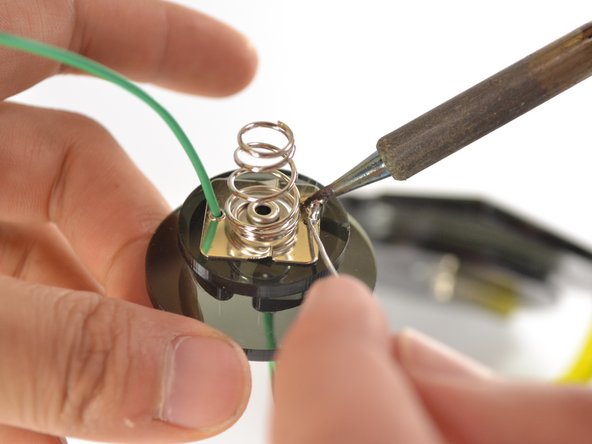
- 使用丙烯酸水泥时,建议您戴上手套,安全眼镜,并在通风的地方工作。

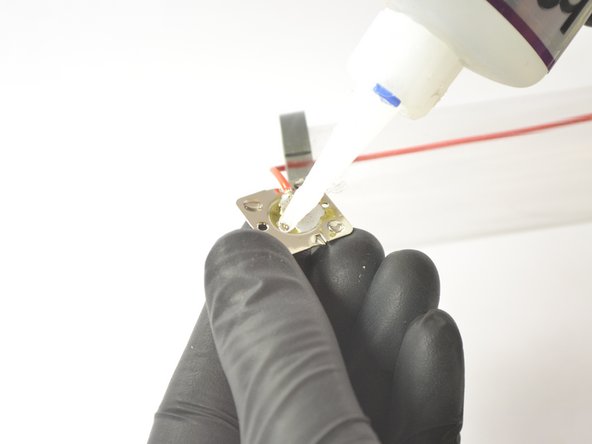
- 使用强力胶。


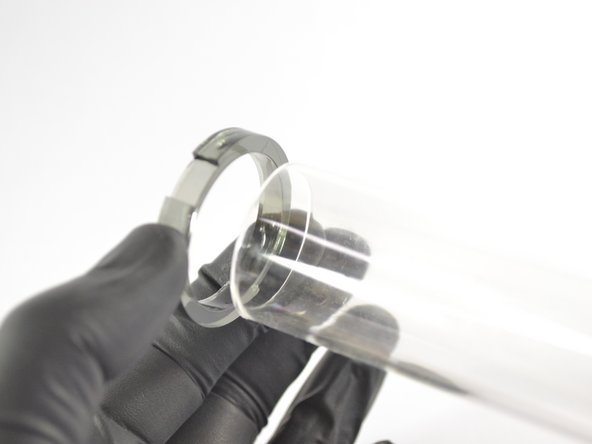
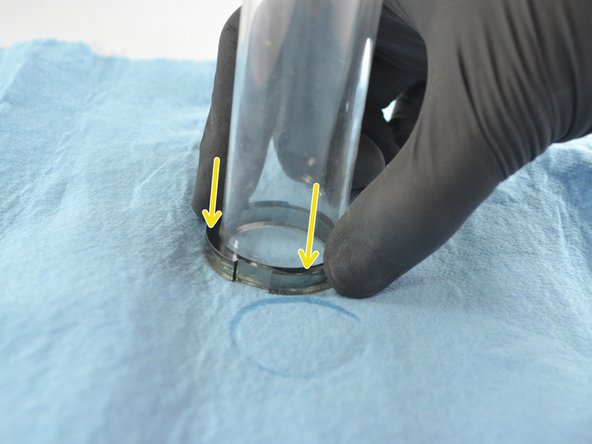
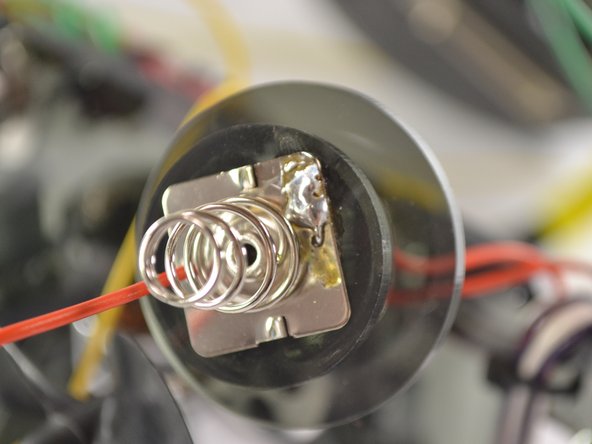
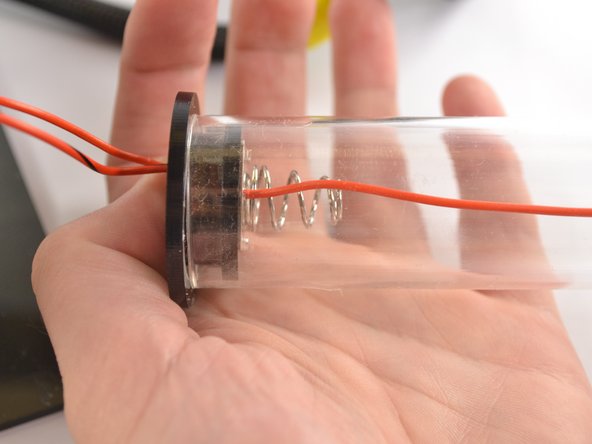
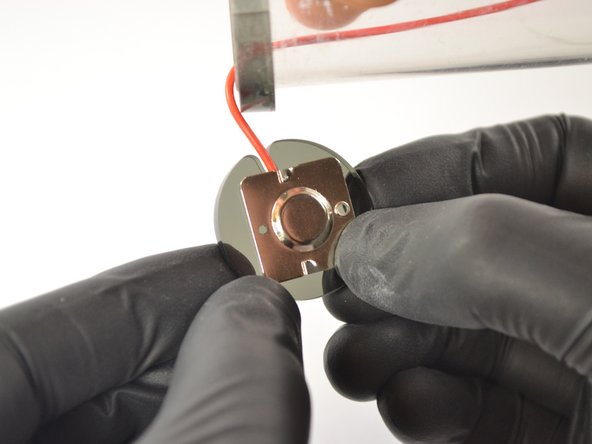
- 向外环施加压力,使其与管的前部齐平。不要让它坐在这个位置干燥,否则它会粘在纸巾上。如果管内有任何胶粘剂,请将其擦去。

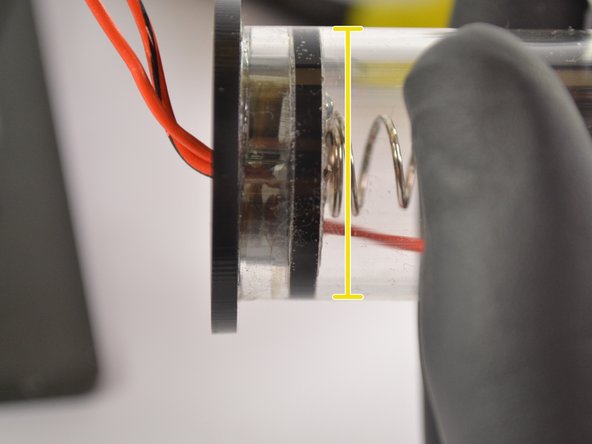
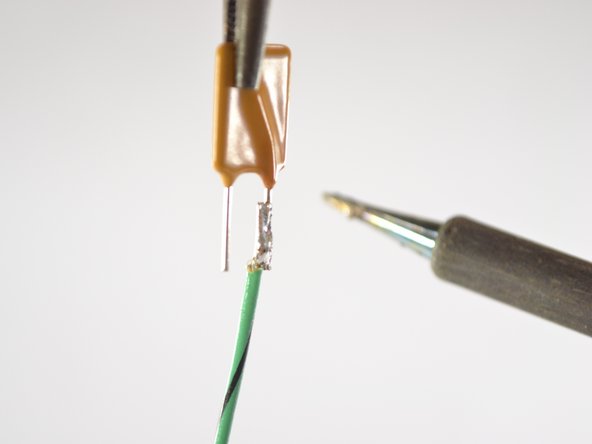
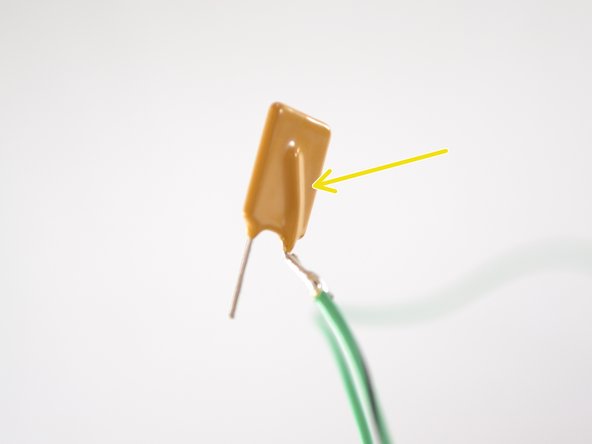
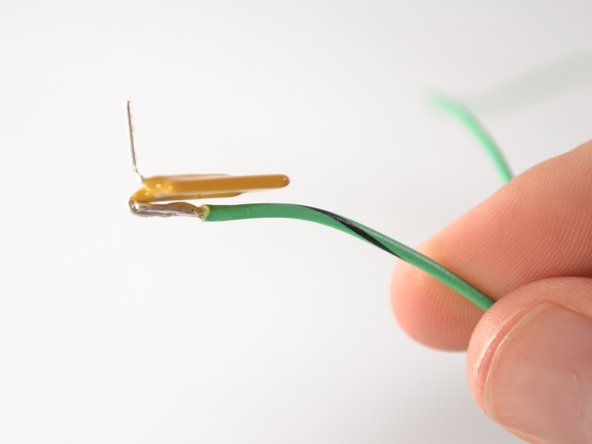
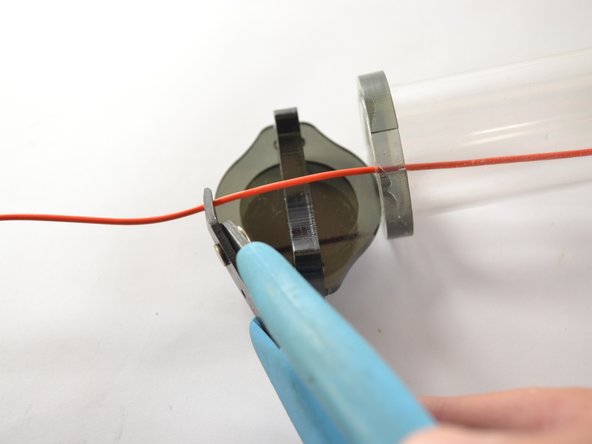
- 使用对侧电机测量长度。仅剪断带有黑色条纹的电线。请勿切断橙色实线。
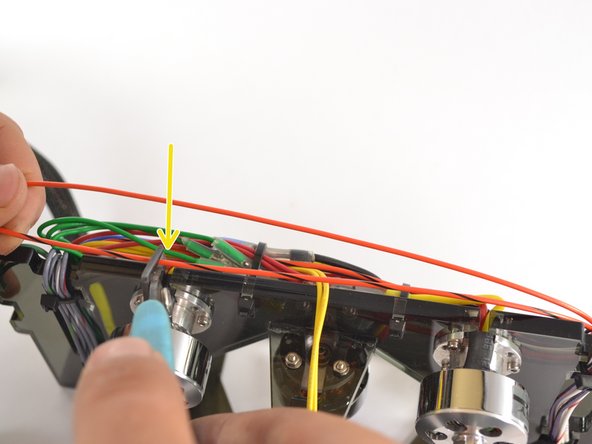

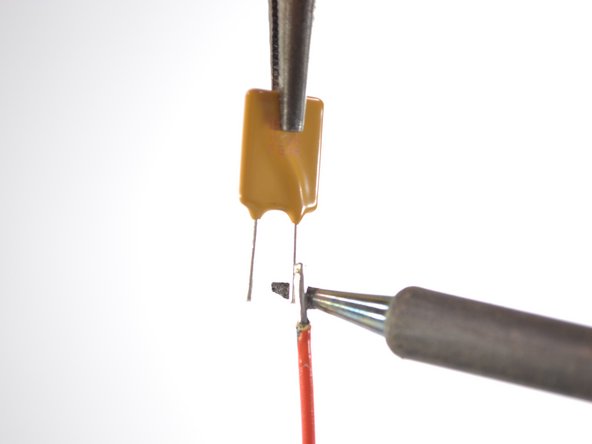

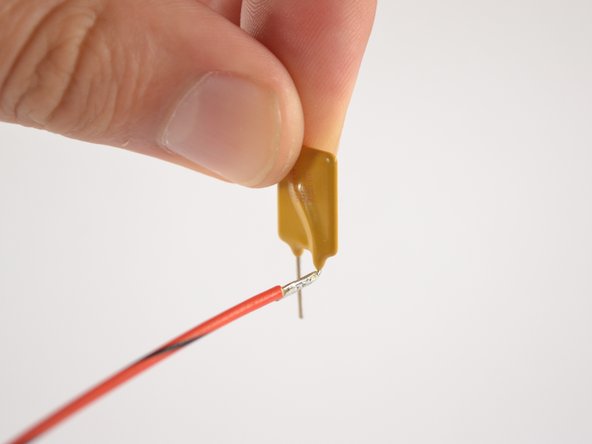
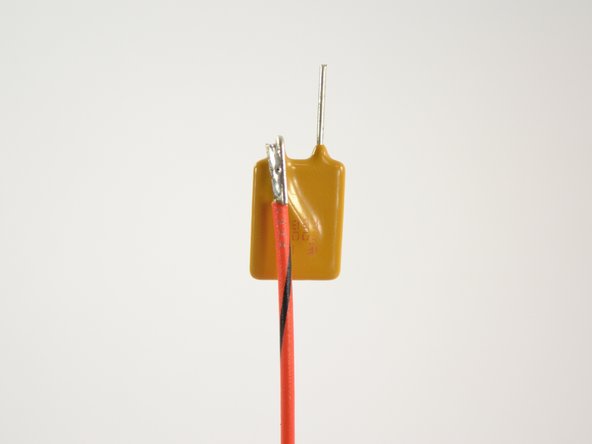


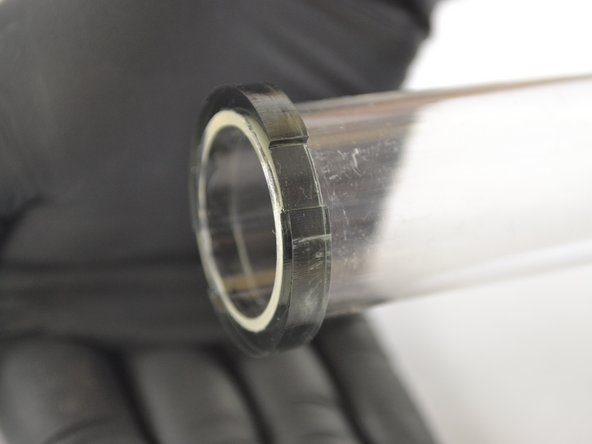
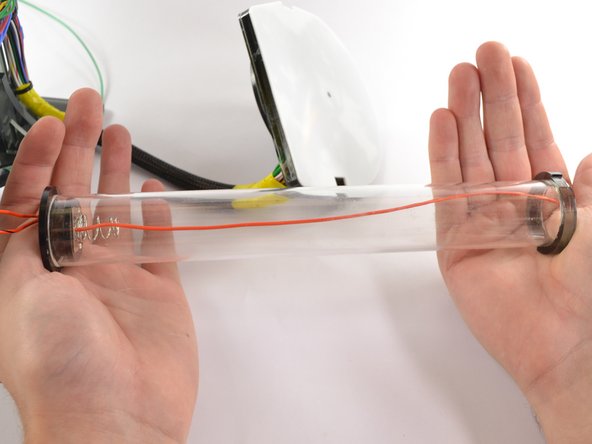
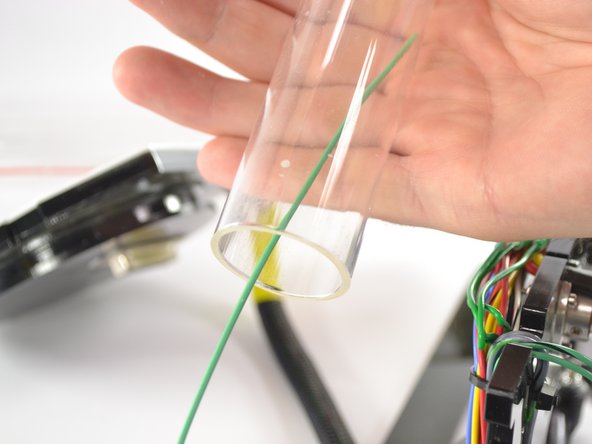
- 尽力使这些零件同心。
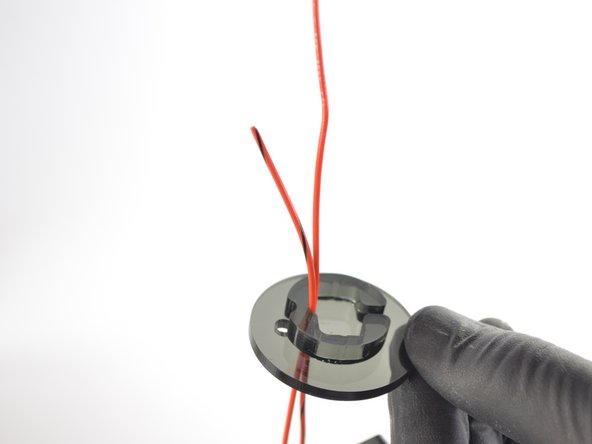
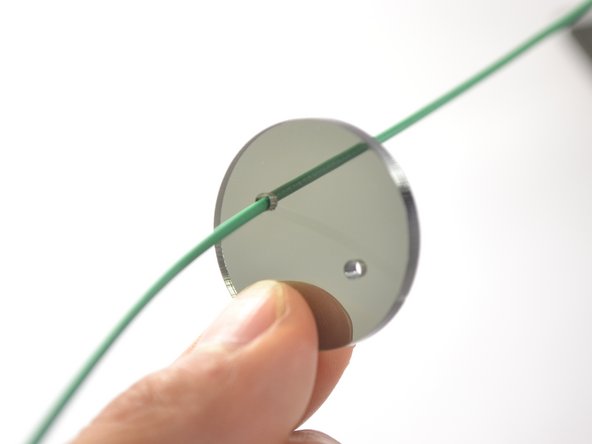
- 确保电线穿过两个孔中较大的一个。

- 如果电池管有点紧,则可以打磨内角以去除边缘的毛刺。
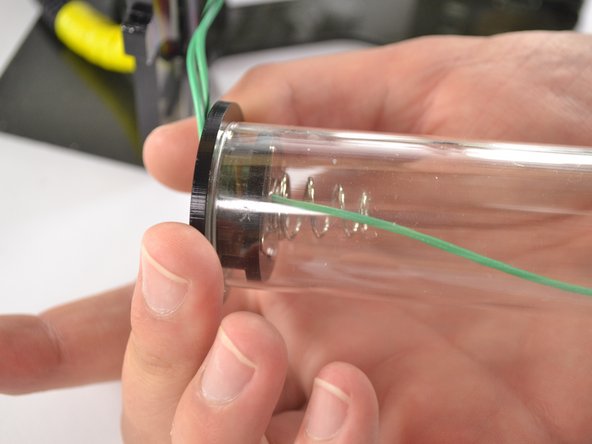
- 确保水泥是整个过程。
- 使用对面电机的中心作为您测量的长度。仅剪断带有黑色条纹的电线。请勿切断绿色实线。

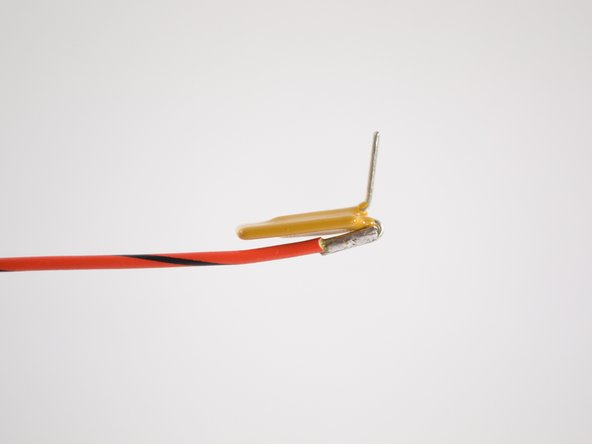
- 向与弯曲相同的一侧弯曲。
- 尽力使这些零件同心。
- 为了推动电池管的背面,需要一定的压力。
- 确保水泥是整个过程。

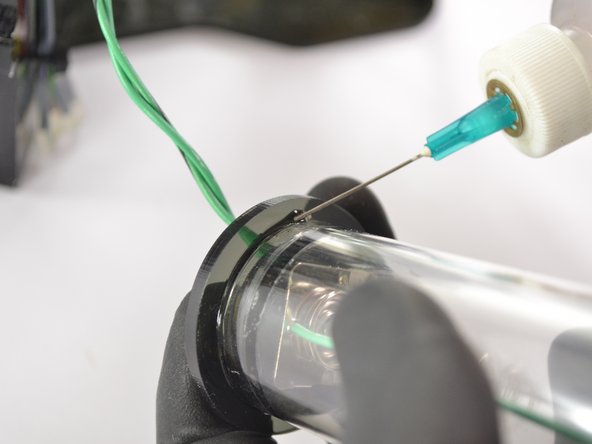


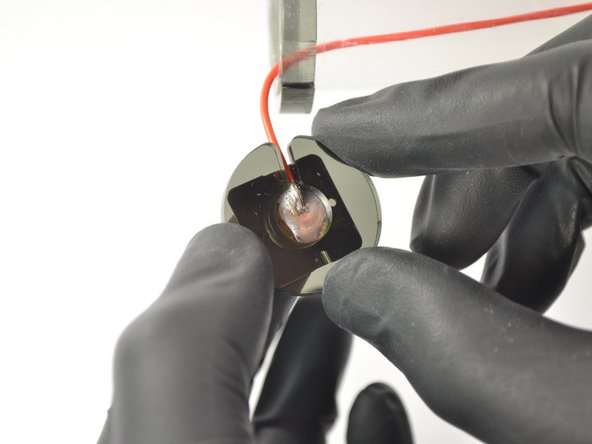



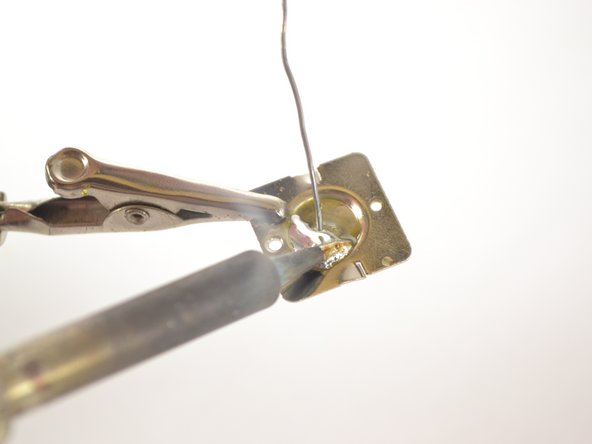

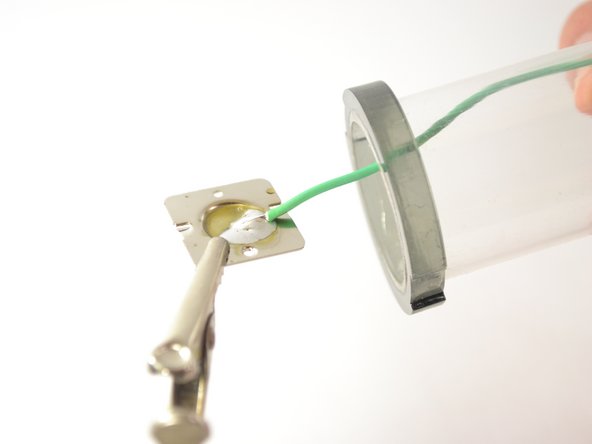


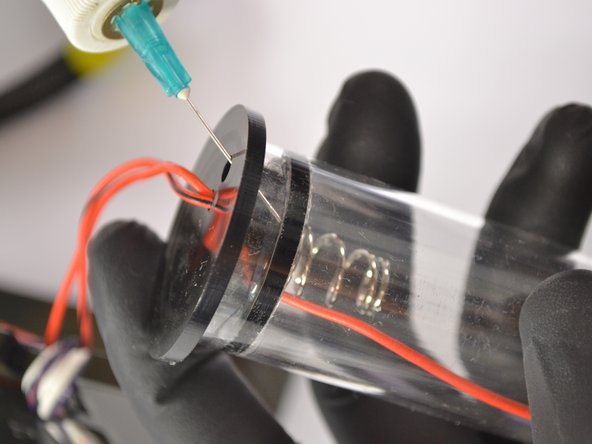
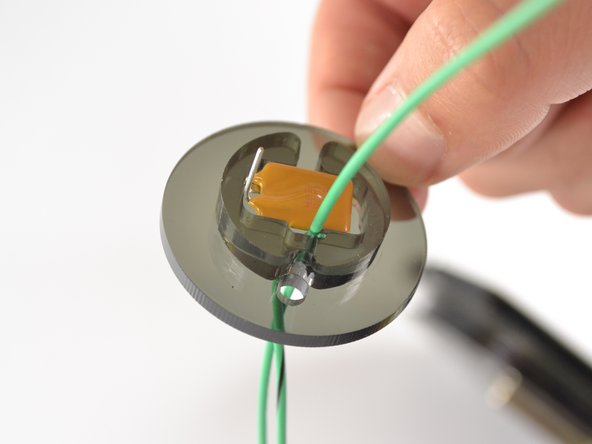
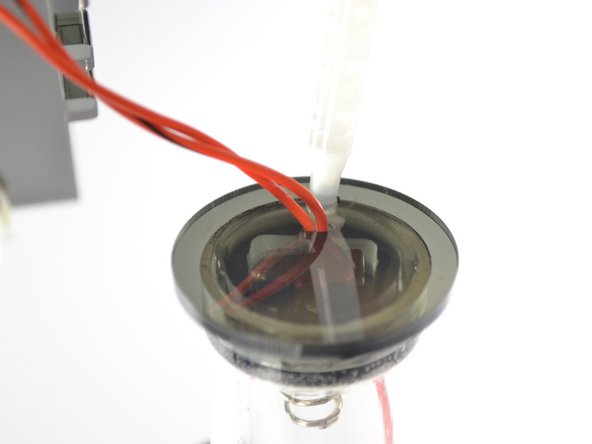
- 使用环氧树脂填充电池管的末端。
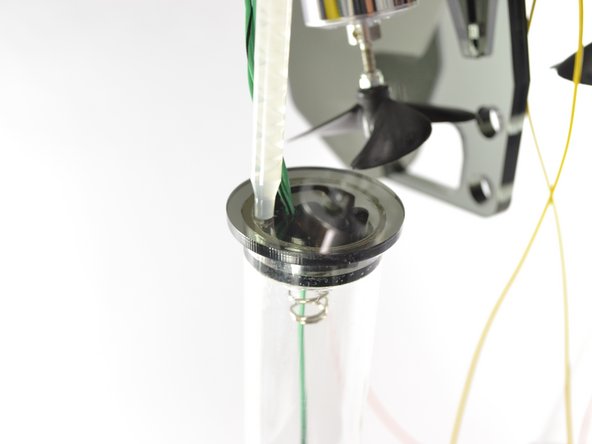
- 环氧树脂将流过整个腔体。
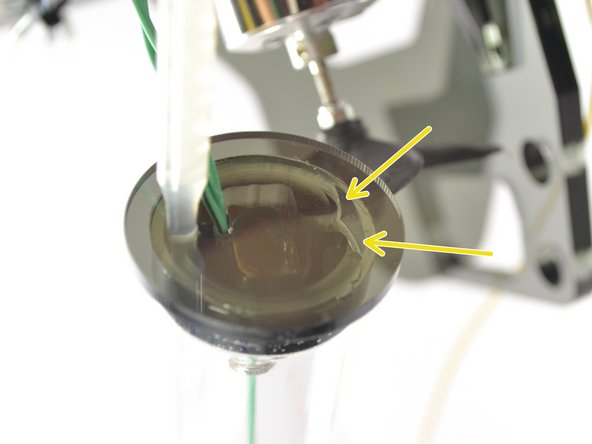
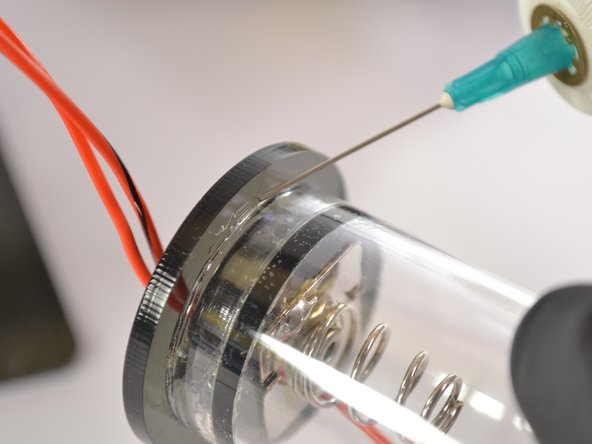
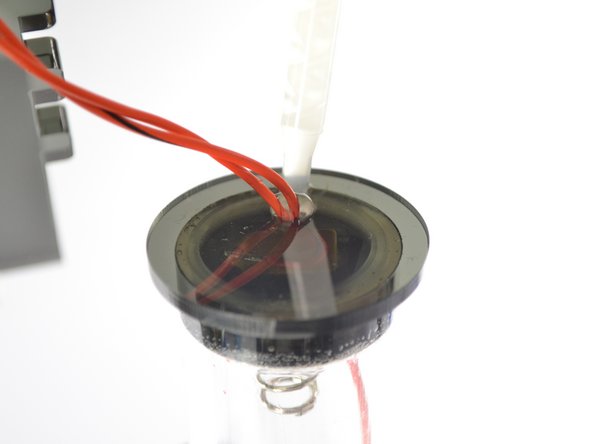
- 用电线填充,直到从孔中出来为止。
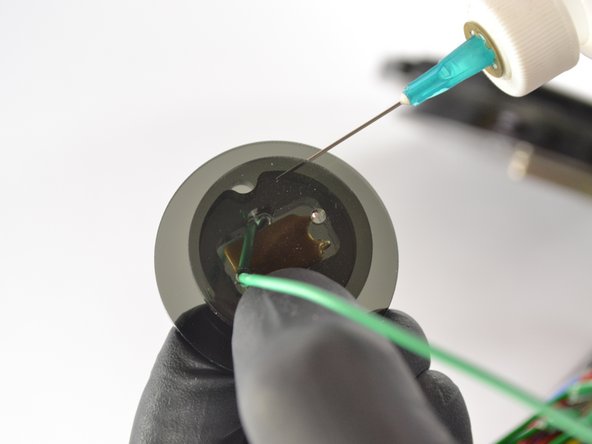
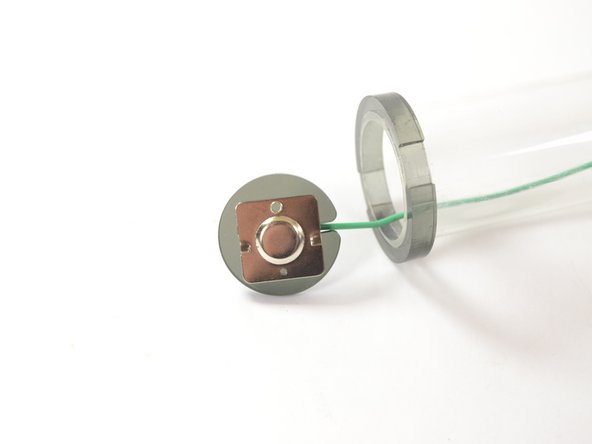
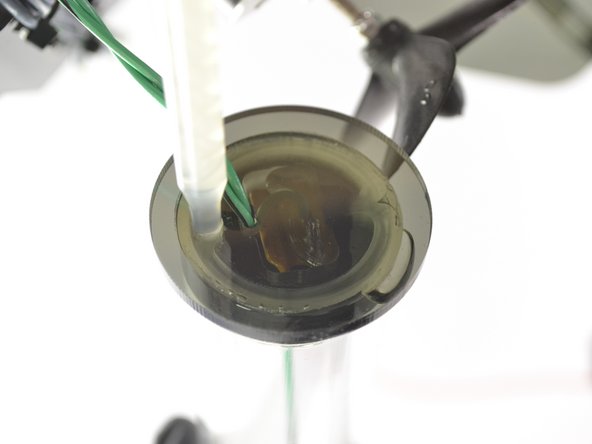
- 擦去所有渗出的环氧树脂。一段时间后,环氧树脂将沉降,孔中的液位下降。30分钟后再检查一次,并在该孔中填充更多的环氧树脂。

- 一段时间后,环氧树脂将沉降,孔中的液位下降。30分钟后再检查一次,并在该孔中填充更多的环氧树脂。

获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号