



















Pupper机器狗入门教程-校准
Pupper机器狗入门教程-校准
说明:
- 介绍如何进行校准
- 在运行机器人之前,校准是必不可少的步骤,因为我们尚无法精确测量出伺服臂相对于伺服输出轴的固定方式。
- 运行校准脚本将提示您将12个自由度中的每个自由度与已知角度(例如水平或垂直)对齐,从而帮助您确定此旋转偏移。
准备:
- 成品机器人
- 某种支架可以支撑机器人,使其腿部可以伸展而不会接触地面/桌子。
步骤:
- 插入2S Lipo电池
- 如安装部分所述通过SSH进入机器人
- 停止机器人脚本接管PWM输出:
rw
sudo systemctl stop robot
- 校准脚本将提示您校准纸粉机的12个伺服电机中的每一个。
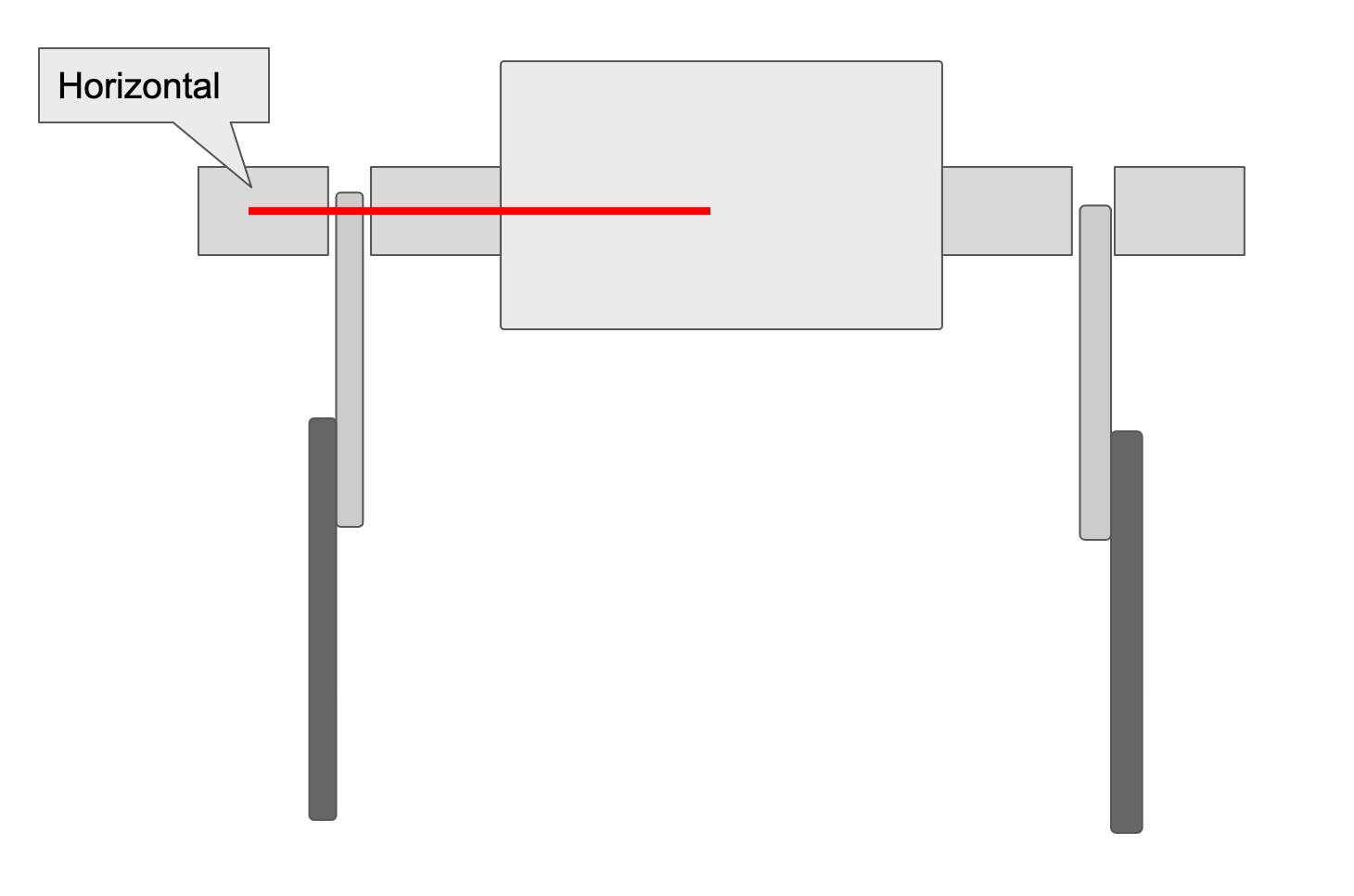
- 当它要求您将链接移动到水平位置时,您可能想知道什么才算使链接水平。
- 答案是对齐每个链接的关节中心。
- 例如,将上链节与水平对齐时,您需要使伺服花键和将上链节与下链节连接的螺栓之间的线尽可能水平。
cd StanfordQudruped
sudo pigpiod
python3 calibrate_servos.py
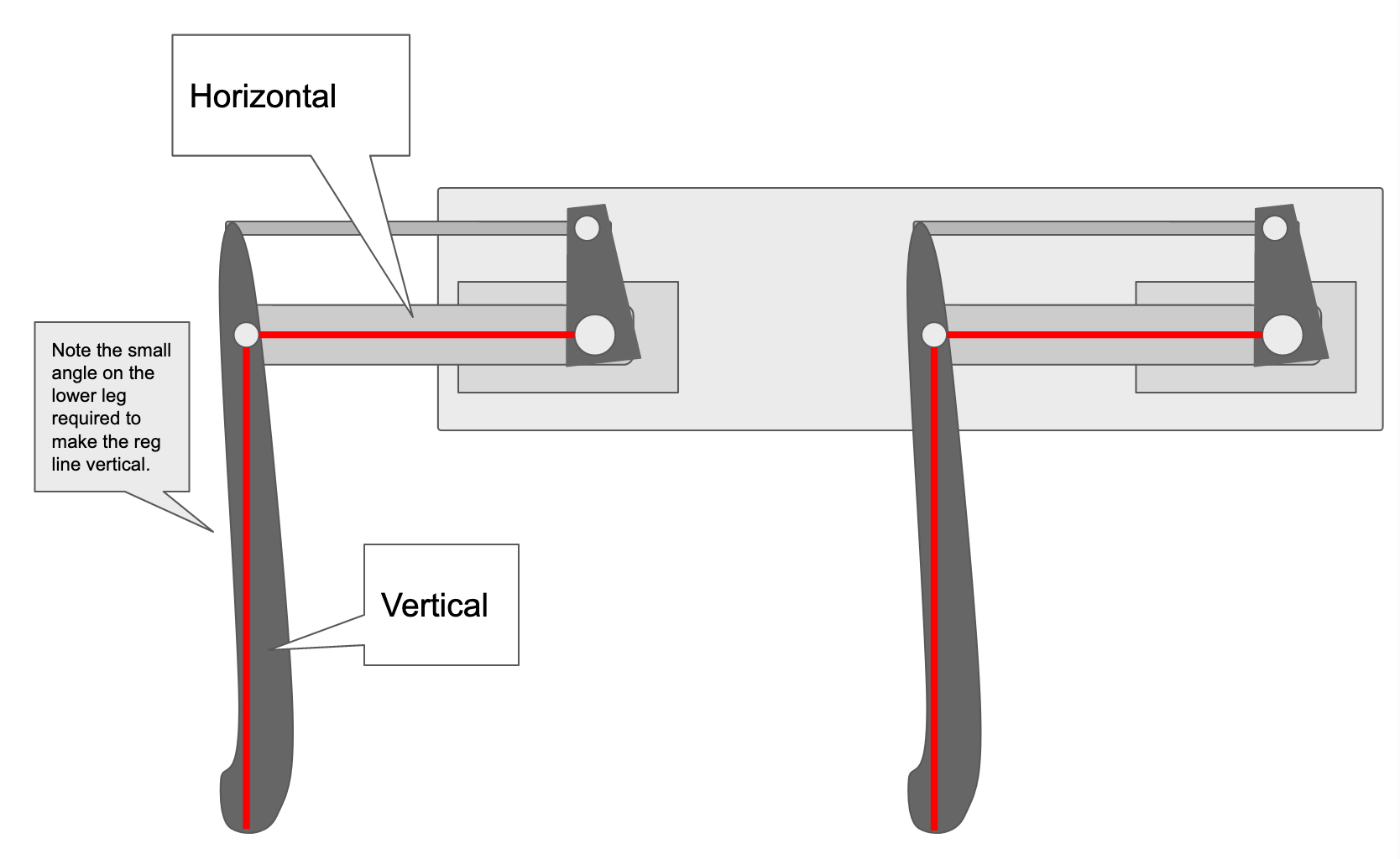
下图说明了校准脚本中提到的水平和垂直位置。
如果您的伺服器无法到达这些位置,则可能是伺服盘和/或臂的组装不正确。
水平效果图:
- 垂直效果图:
- 重新启用机器人脚本:
sudo systemctl start robot
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号