



















Turbot3-Multi与仿真教程-单机大场景建图
Turbot3-Multi与仿真教程-单机大场景建图
说明:
- 介绍如何进行单机的大场景的建图
- 测试面积是400平米
相关设备:
- Turbot3-Multi套件,采购地址
准备:
- 默认burger的雷达仿真测距只有3.5米,需要修改测距为30米
- 默认gmapping slam的maxRange为3.5米,需要修改测距为30米
建图步骤:
- 根据gazebo模型搭建大场景地图
- 新开终端,启动仿真
./multi_scripts/single_gazebo_bigmap.sh max
- 效果如图:
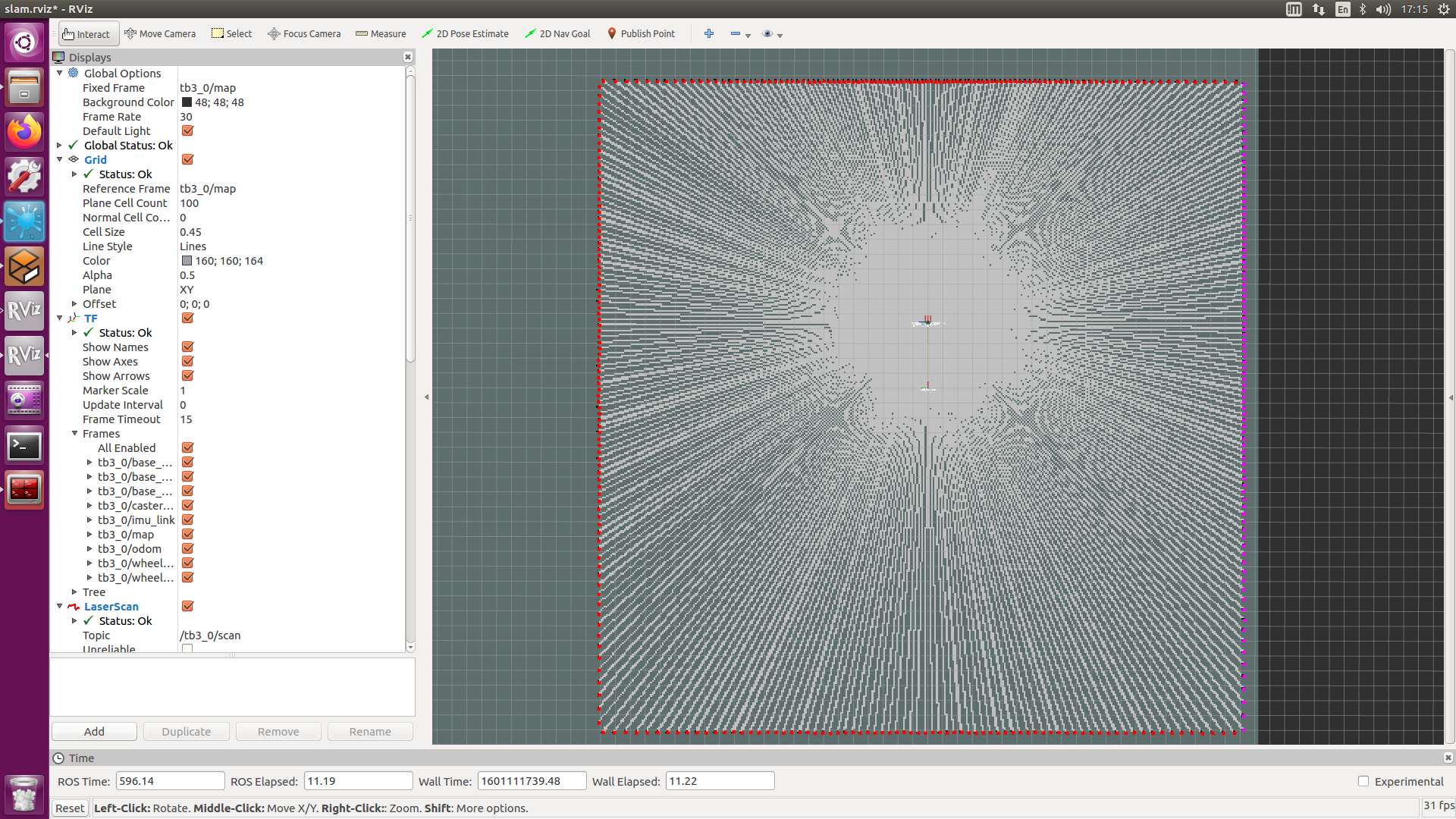
- 新开终端,启动建图
./multi_scripts/single_slam_bigmap.sh
- 新开终端,启动rviz
./multi_scripts/single_rviz_slam.sh
- 新开终端,启动键盘控制
./multi_scripts/multi_key.sh 0
- 新开终端,启动rviz
./multi_scripts/single_save_map.sh bigmap
- 效果如图:
演示视频
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号