



















Turbot3-Multi与仿真教程-多机定点导航
Turbot3-Multi与仿真教程-多机定点导航
说明:
- 介绍如何实现多机定点导航
相关设备:
- Turbot3-Multi套件,采购地址
步骤:
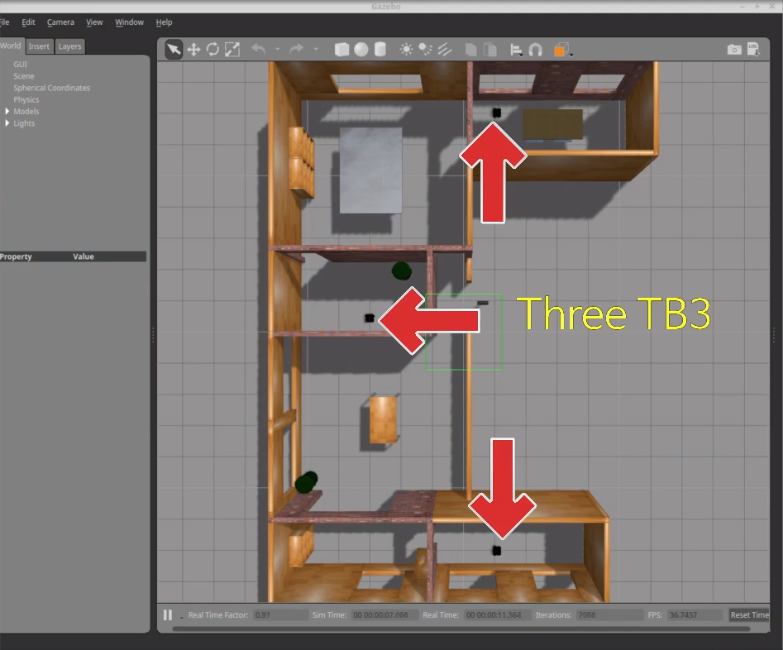
- 新开终端,启动gazebo
./multi_scripts/multi_gazebo.sh
- 效果如图:
- 新开终端,初始化定位
./multi_scripts/multi_init_pose.sh
- 新开终端,启动导航
./multi_scripts/multi_nav.sh
- 效果如图:
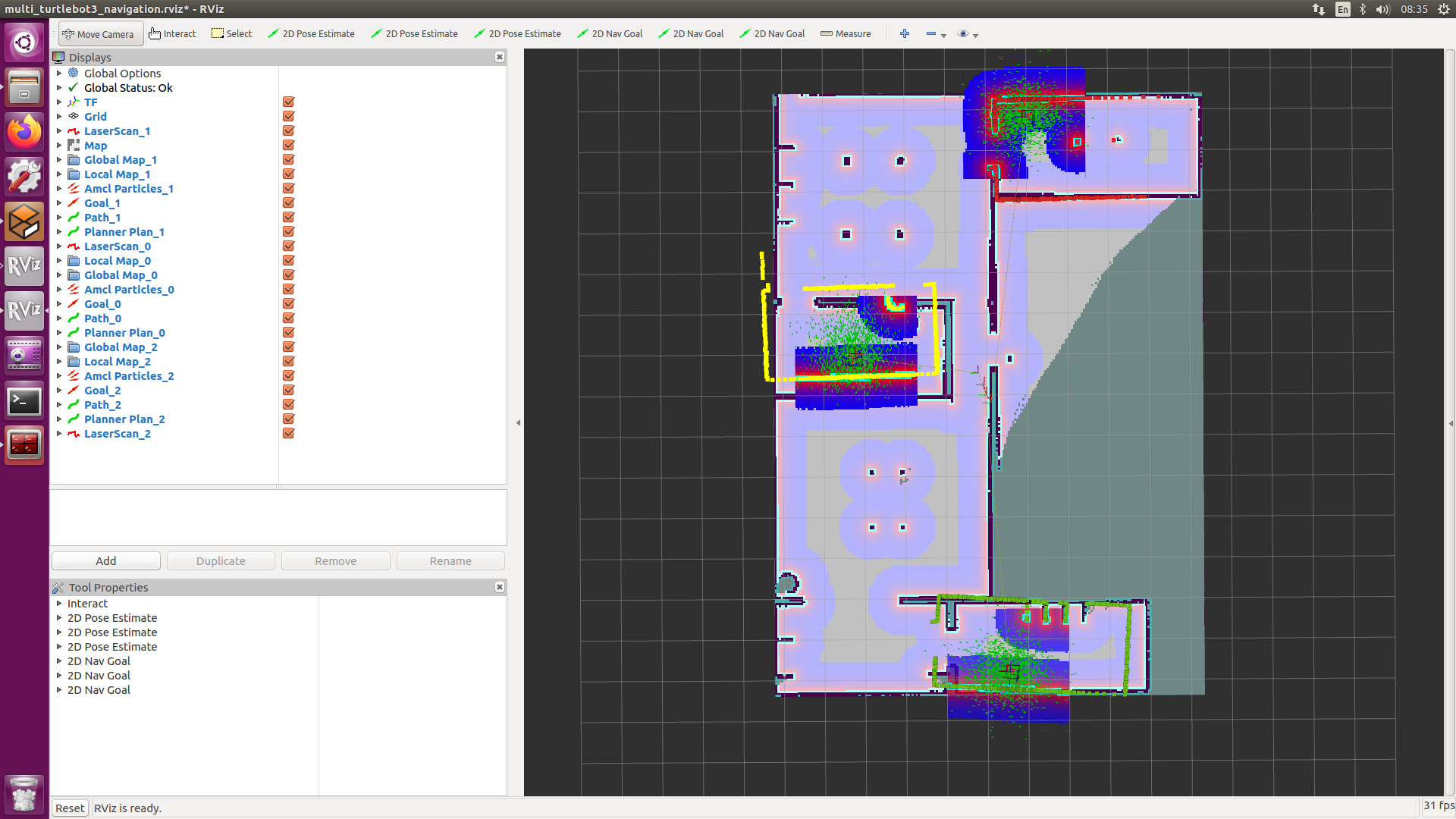
- 通过2D Pose Estimate 分别初始化每个小车的位姿
- 通过2D Nav Goal分别指定小车目标点,既可以自动实现定点导航
- 初始化定位后位姿,效果如图:

- 行进中,效果如图:

演示视频
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号