



















Turtlebot3入门教程-OpenCR软件设置(shell)
Turtlebot3入门教程-OpenCR软件设置(shell)
说明:
- 介绍如何利用脚本来更新固件
步骤:
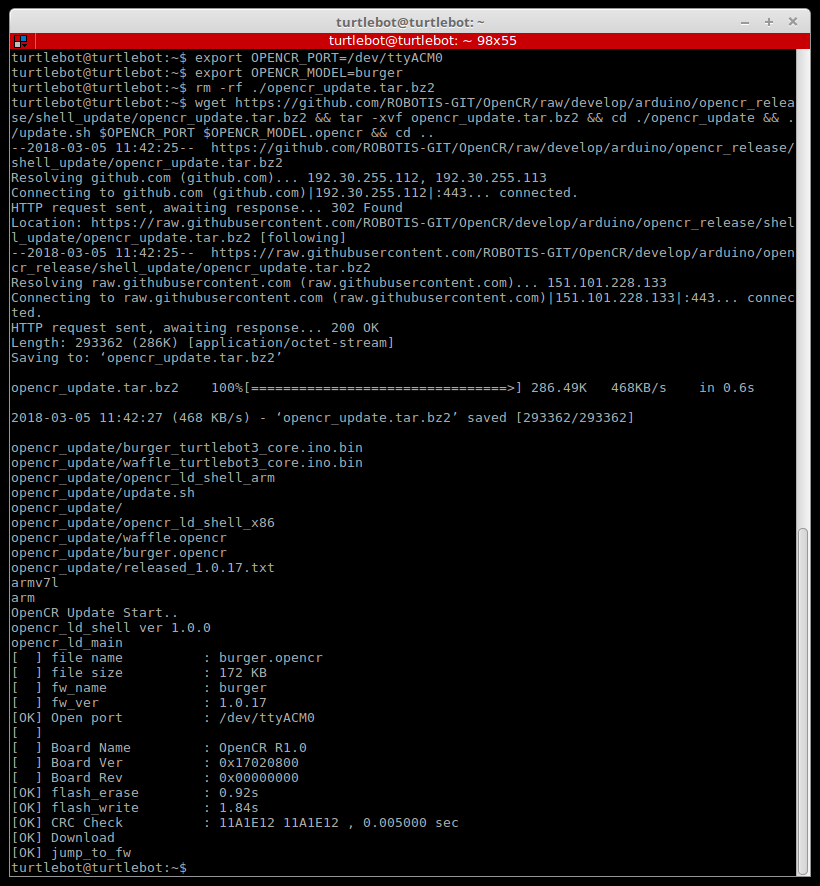
- burger的固件更新
$ export OPENCR_PORT=/dev/ttyACM0
$ export OPENCR_MODEL=burger
$ rm -rf ./opencr_update.tar.bz2
$ wget https://github.com/ROBOTIS-GIT/OpenCR-Binaries/raw/master/turtlebot3/ROS1/latest/opencr_update.tar.bz2 && tar -xvf opencr_update.tar.bz2 && cd ./opencr_update && ./update.sh $OPENCR_PORT $OPENCR_MODEL.opencr && cd ..
- 效果如下:
- waffle或waffle pi的固件更新
$ export OPENCR_PORT=/dev/ttyACM0
$ export OPENCR_MODEL=waffle
$ rm -rf ./opencr_update.tar.bz2
$ wget https://github.com/ROBOTIS-GIT/OpenCR-Binaries/raw/master/turtlebot3/ROS1/latest/opencr_update.tar.bz2 && tar -xvf opencr_update.tar.bz2 && cd ./opencr_update && ./update.sh $OPENCR_PORT $OPENCR_MODEL.opencr && cd ..
- 效果如下:
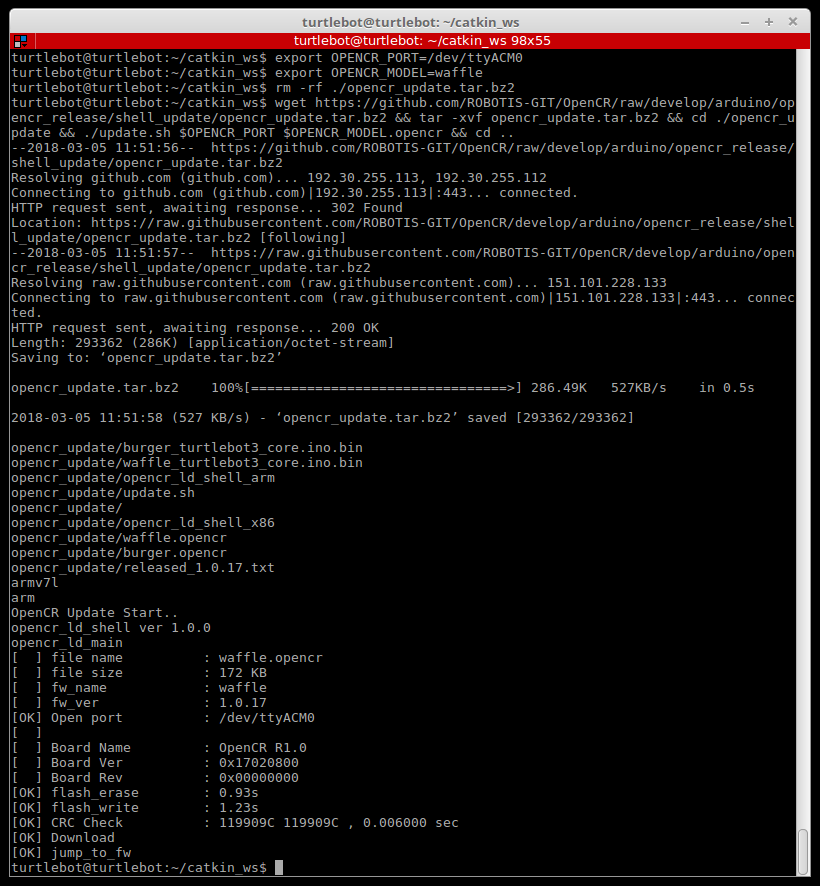
- 更新成功之后,会出现jump_to_fw字样
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号