



















ros2与turtlebot3仿真教程-turtlebot3建图
ros2与turtlebot3仿真教程-turtlebot3建图
说明:
- 介绍如何ros2下实现turtlebot3建图
步骤:
- 新开终端,运行gazebo
$ ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
- 新开终端,运行建图
$ ros2 launch turtlebot3_cartographer cartographer.launch.py use_sim_time:=True
- 新开终端,启动键盘
$ ros2 run turtlebot3_teleop teleop_keyboard
控制小车随机移动,并进行建图,并查看建立的地图,差不多后,保存地图。
效果如下:
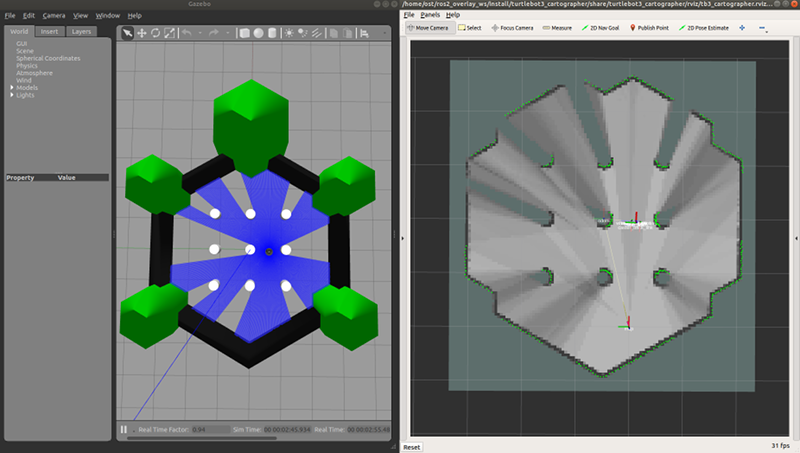
- 新开终端,保存地图
$ ros2 run nav2_map_server map_saver_cli -f ~/map
- 地图保存在目录下
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号