



















ros2与turtlebot3仿真教程-启动gazebo不同环境
ros2与turtlebot3仿真教程-启动gazebo不同环境
说明:
- 介绍如何在ros2下使用gazebo
- 默认安装foxy已经安装了gezebo11.0
步骤:
- 下载gazebo的模型,加速运行gazebo
cd ~/.gazebo/
git clone https://github.com/osrf/gazebo_models models
- 需要删除.git目录,要不运行会出错
rm -rf models/.git
- 设置GAZEBO_MODEL_PATH变量, 指定机器人类型为burger
$ echo 'export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:~/tb3_ws/src/turtlebot3/turtlebot3_simulations/turtlebot3_gazebo/models' >> ~/.bashrc
$ echo 'export TURTLEBOT3_MODEL=burger' >> ~/.bashrc
$ source ~/.bashrc
启动Fake Node
- 启动Fake Node
$ ros2 launch turtlebot3_fake_node turtlebot3_fake_node.launch.py
- 启动后弹出rviz,并显示小车模型
- 启动键盘控制
$ ros2 run turtlebot3_teleop teleop_keyboard
- 效果图如下:

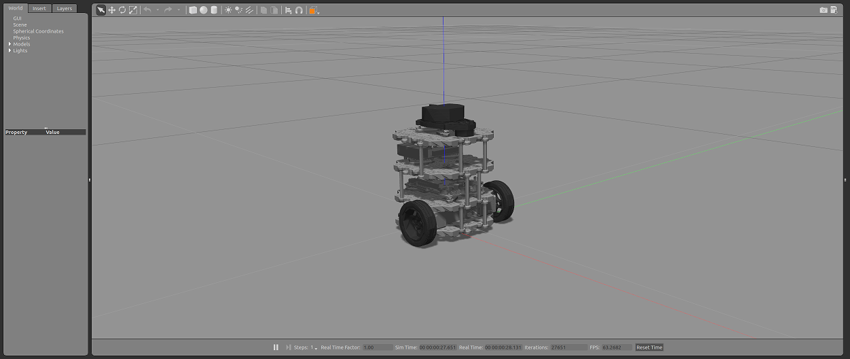
启动empty地图
- 新开终端,启动gezebo,并带有empty地图
$ ros2 launch turtlebot3_gazebo empty_world.launch.py
- 效果如下:
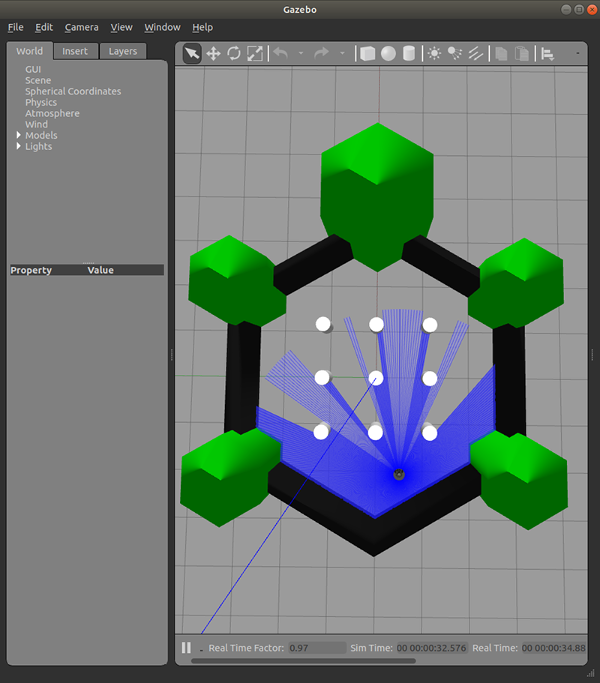
启动world地图
- 新开终端,启动gezebo,并带有world地图
$ ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
- 效果如下:
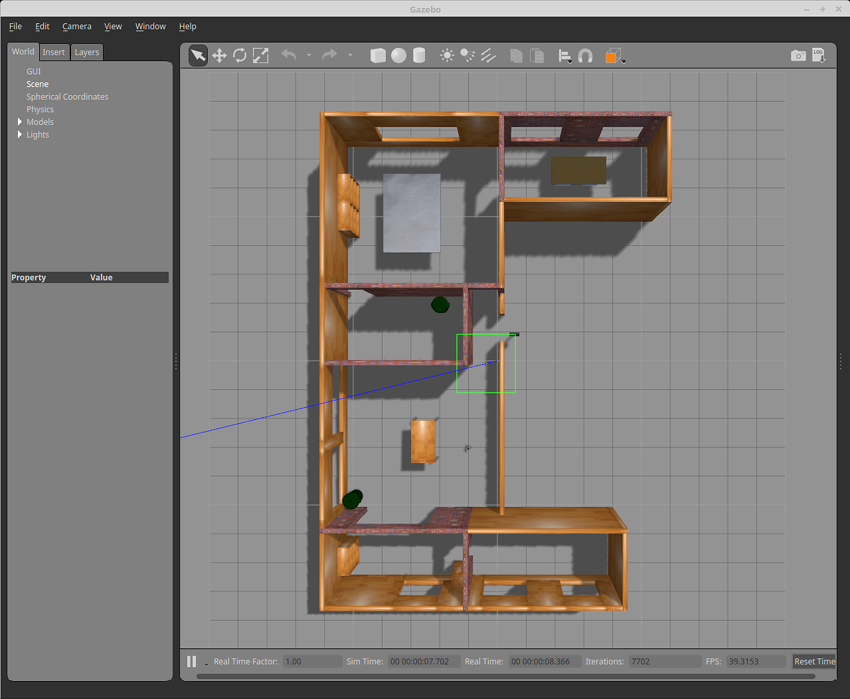
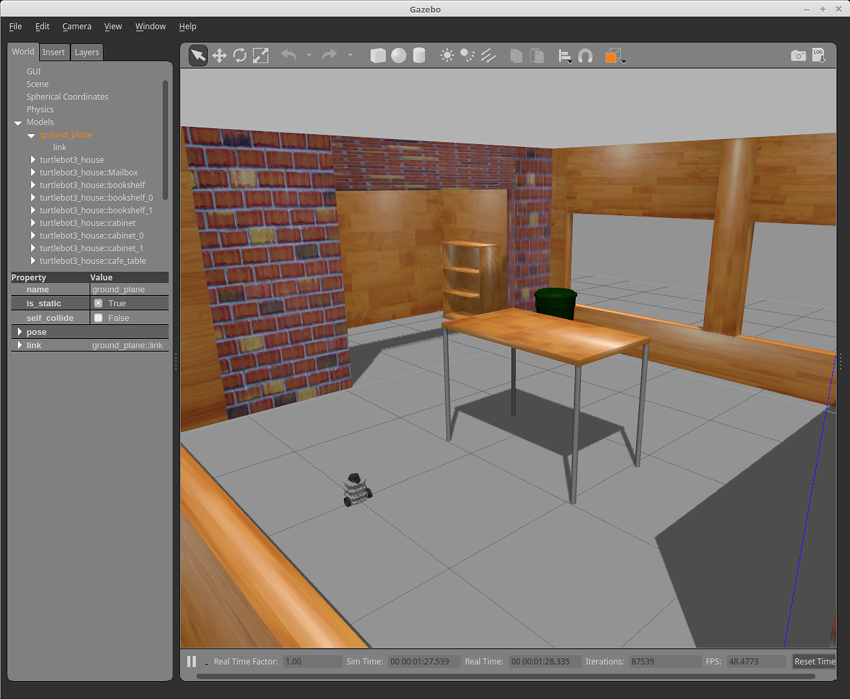
启动house地图
- 新开终端,启动gezebo,并带有house地图
$ ros2 launch turtlebot3_gazebo turtlebot3_house.launch.py
- 效果如下:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号