



















ROS2入门教程-turtlesim和rqt
ROS2入门教程-turtlesim和rqt
说明:
- 介绍如何运行turtlesim例子和rqt交互
步骤:
- 安装turtlesim
sudo apt update
sudo apt install ros-<distro>-turtlesim
使用你的ros版本替代,如ros-foxy-turtlesim - 检查是否安装成功
ros2 pkg executables turtlesim
- 效果如下:
turtlesim draw_square
turtlesim mimic
turtlesim turtle_teleop_key
turtlesim turtlesim_node
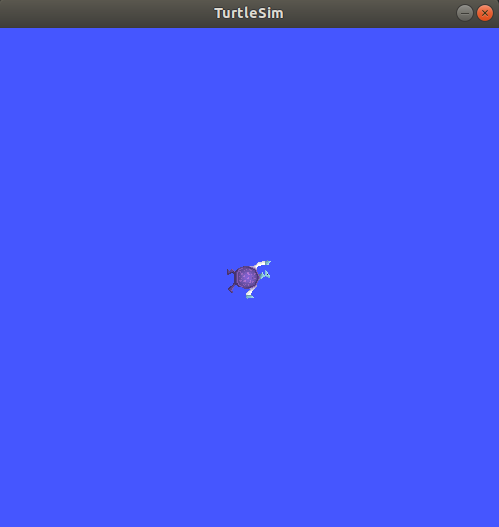
- 启动turtlesim
ros2 run turtlesim turtlesim_node
- 如图:
- 新开终端,启动键盘
ros2 run turtlesim turtle_teleop_key
- 通过控制键盘的方向键,就可以控制小乌龟移动
- 安装rqt
sudo apt update
sudo apt install ~nros-<distro>-rqt*
- 启动rqt
rqt
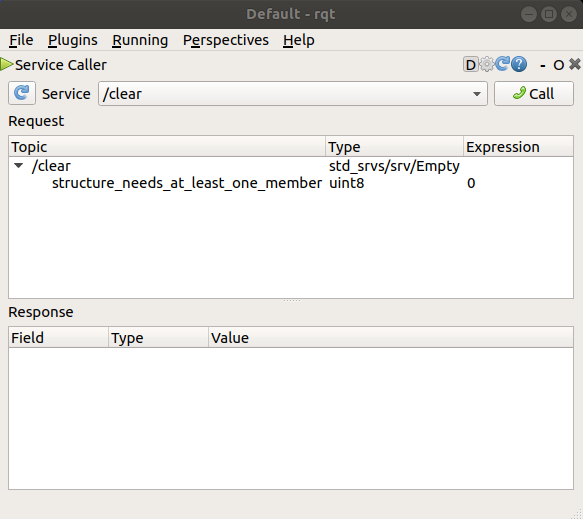
- 使用rqt
- 选择Plugins > Services > Service Caller
- 效果如图:
- 测试spawn service
- 选择service为spawn
- 更改name为turtle2 ,更改坐标为x = 1.0 和y = 1.0
- 效果如图:
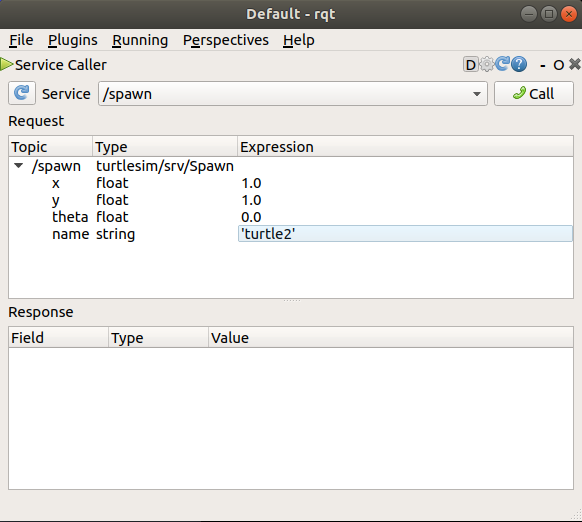
点击call之后,会在指定的位置弹出第二个小乌龟
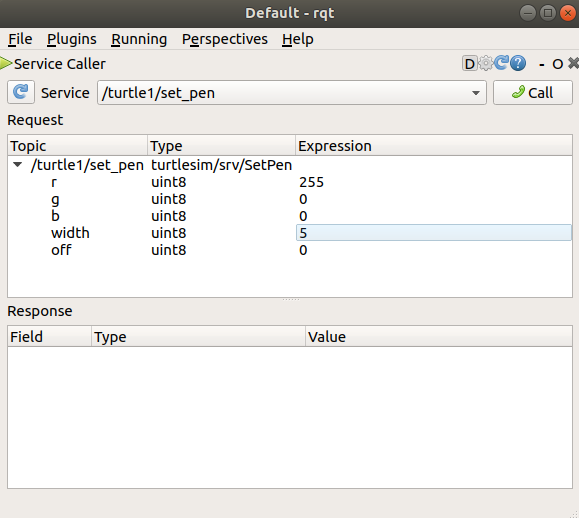
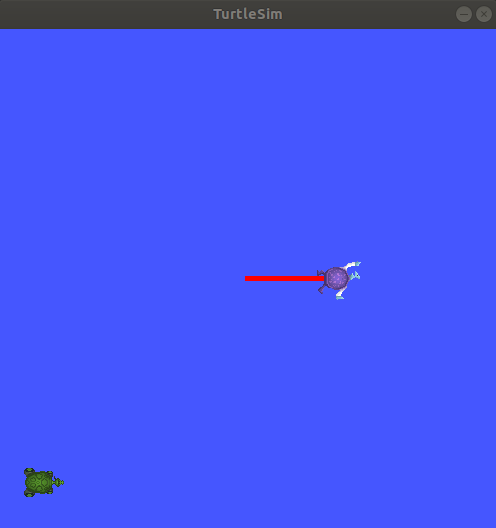
测试set_pen service
更改r, g 和 b的值改变小乌龟的移动轨迹的颜色
效果如下:
- 控制移动小乌龟如图
- remap话题
- 指定控制第二个小乌龟
ros2 run turtlesim turtle_teleop_key --ros-args --remap turtle1/cmd_vel:=turtle2
- 关闭turtlesim,通过ctrl + c来中止
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号