LEO机器人入门教程-RosStudio移动LEO
说明:
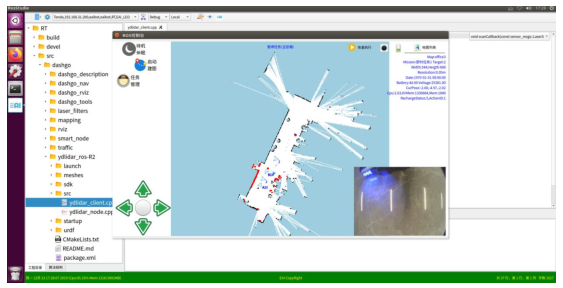
介绍如何通过RosStudio的ROS控制台移动LEO
ros 控制台主要的功能有:控制 ros 机器人移动,建图,导航、执行任务(导航到目标点)和驱动控制
操作步骤:
点击菜单栏的“工具”
选择“ROS控制台”
按住方向按钮不放,可以连续控制 robot 移动,中间按钮是停止移动
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号

专注于ROS1/ROS2机器人系统为核心的开源硬件、开源软件的整理和分享 。覆盖Turtlebot2,Turtlebot3,Turtlebot4,无人机,无人船,无人车,机械臂,嵌入式,操作系统,开发语言,Arduino,Raspberry Pi,树莓派,UAV, Pixhawk,Paparazzi等
 |
创造源于生活 生活在于折腾 |


















说明:
介绍如何通过RosStudio的ROS控制台移动LEO
ros 控制台主要的功能有:控制 ros 机器人移动,建图,导航、执行任务(导航到目标点)和驱动控制
操作步骤:
点击菜单栏的“工具”
选择“ROS控制台”
按住方向按钮不放,可以连续控制 robot 移动,中间按钮是停止移动
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号