



















racebot入门教程-仿真-启动仿真器(新版)
racebot入门教程-仿真-启动仿真器(新版)
说明:
- 介绍如何使用轻量级的racebot仿真
相关设备:
- racebot套件,采购地址
步骤:
- [racebot] 新开终端,加载仿真工作空间
source ~/simf1_ws/devel/setup.bash
- 在当前终端新,启动
roslaunch racecar_simulator simulator.launch
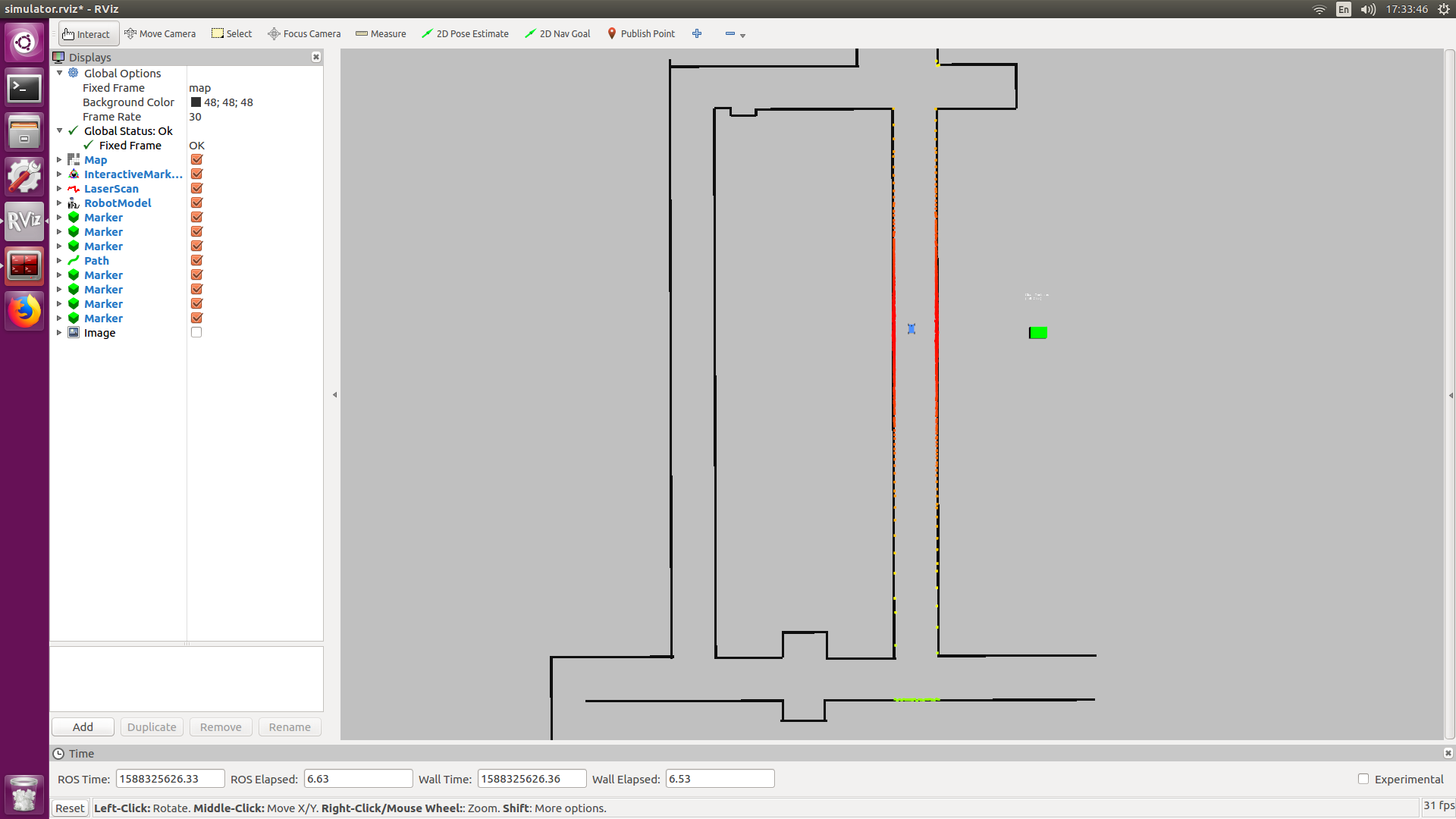
- 效果如下:
- 默认有发布如下话题:
rostopic list
/brake
/brake_bool
/clicked_point
/diagnostics
/drive
/dynamic_viz
/dynamic_viz_array
/env_viz
/env_viz_array
/imu
/initialpose
/joy
/key
/map
/map_metadata
/map_updates
/move_base_simple/goal
/mux
/nav
/odom
/path_lines
/path_lines_array
/pose
/racecar/joint_states
/racecar_sim/feedback
/racecar_sim/update
/racecar_sim/update_full
/rand_drive
/rosout
/rosout_agg
/scan
/smoothed_path
/static_viz
/static_viz_array
/tf
/tf_static
/tree_lines
/tree_lines_array
/tree_nodes
/tree_nodes_array
/waypoint_vis
/waypoint_vis_array
- 话题结构图

- 查看几个话题
rostopic echo /scan
- 查看odom
rostopic echo /odom
通过游戏杆LB键 打开 游戏杆控制,游戏杆LT键 打开 键盘控制,游戏杆RB键 打开 导航控制
默认通过游戏杆控制小车移动,就可以通过左摇杆控制小车前后,右摇杆控制小车左右
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号