



















racebot入门教程-仿真-A-Star算法和Dijkstra算法规划仿真(新版)
racebot入门教程-仿真-A-Star算法和Dijkstra算法规划仿真(新版)
说明:
- 介绍如何仿真和实现A-Star算法和Dijkstra算法规划仿真
相关设备:
- racebot套件,采购地址
步骤:
- 默认仿真环境不自动加载,需要手动加载
- [racebot]新开终端,激活仿真工作空间
source ~/simf1_ws/devel/setup.bash
- [racebot]在当前终端下,启动仿真实例
roslaunc planning_example planning_toy.launch
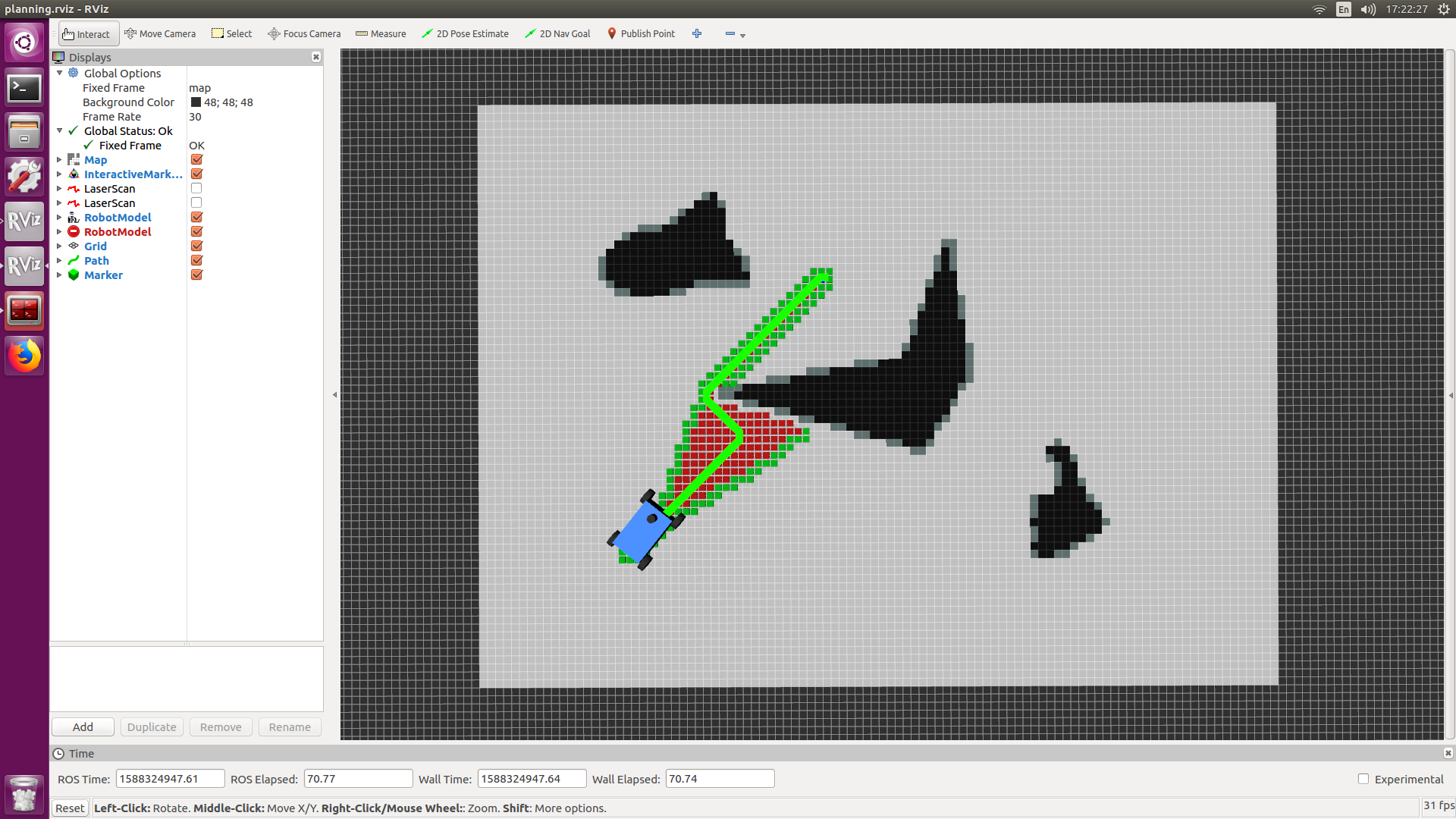
在打开的rviz下,选择2D POSE Estimate,在地图点拉一个位置,会出现一个小车模型
再选择2D Nav Goal, 就会出现寻找路径,成功规划路径后,会显示绿色路径。
Dijkstra规划算法效果如下:

- 默认采用Dijkstra算法规划路径
- 如果需要采用A*算法规划路径
rosed planning_example planning_toy.py
修改为
self.use_astar=TrueA-Star规划算法效果如下:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号