



















Turtlebot3-ARM入门教程-OpenCR设置
说明
- 本教程介绍如何上传Turtlebot3-ARM的固件到OpenCR控制板
操作步骤
注意:
安装前请确保将所有DYNAMIXEL舵机都与OpenCR连接;否则,可能会导致
Raspberry Pi出现意外错误固件完全上传后,OpenCR板将重新启动,并且OpenMANIPULATOR-X的姿势将其姿势更改为初始姿势
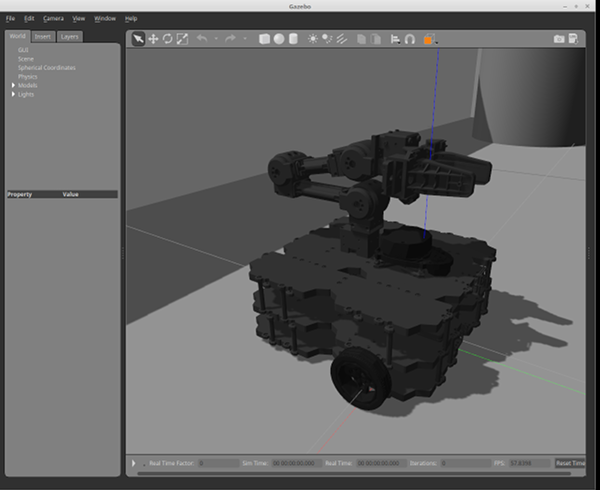
因此,为避免机器人可能造成的物理损坏,在将固件上传到OpenCR之前,请确保使机器人的姿势与下图中的姿势相同
- [TurtleBot3 SBC] 上传固件到OpenCR上
$ export OPENCR_PORT=/dev/ttyACM0
$ export OPENCR_MODEL=om_with_tb3
$ rm -rf ./opencr_update.tar.bz2
$ wget https://github.com/ROBOTIS-GIT/OpenCR-Binaries/raw/master/turtlebot3/ROS1/latest/opencr_update.tar.bz2
$ tar -xvf opencr_update.tar.bz2
$ cd ./opencr_update && ./update.sh $OPENCR_PORT $OPENCR_MODEL.opencr && cd ..
// 上传成功后
armv7l
arm
OpenCR Update Start..
opencr_ld_shell ver 1.0.0
opencr_ld_main
[ ] file name : om_with_tb3.opencr
[ ] file size : 206 KB
[ ] fw_name : om_with_tb3
[ ] fw_ver : 2.0.1
[OK] Open port : /dev/ttyACM0
[ ]
[ ] Board Name : OpenCR R1.0
[ ] Board Ver : 0x17020800
[ ] Board Rev : 0x00000000
[OK] flash_erase : 0.95s
[OK] flash_write : 2.23s
[OK] CRC Check : 14127B2 14127B2 , 0.008000 sec
[OK] Download
[OK] jump_to_fw
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号