



















autodrive入门教程-离线建图-实现BLAM离线建图
autodrive多线入门教程-离线建图-实现BLAM离线建图
说明:
- 介绍如何实现blam算法离线建图
步骤:
- [autodrive]启动blam,使用vlp 16线的rosbag
roslaunch racebot_slam blam_offline.launch bag_file:=/home/ubuntu/rosbag/vlp_nsh_indoor_outdoor.bag
- [autodrive]或者启动blam,使用rslidar 16线的rosbag
roslaunch racebot_slam blam_offline.launch use_vlp:=false bag_file:=/home/ubuntu/rosbag/rslidar_blam_indoor.bag
- 指定不同雷达,使用的话题和参数是有变化的
- [autodrive/pc]启动rviz
roslaunch racebot_rviz blam_rviz.launch
- 效果如下:

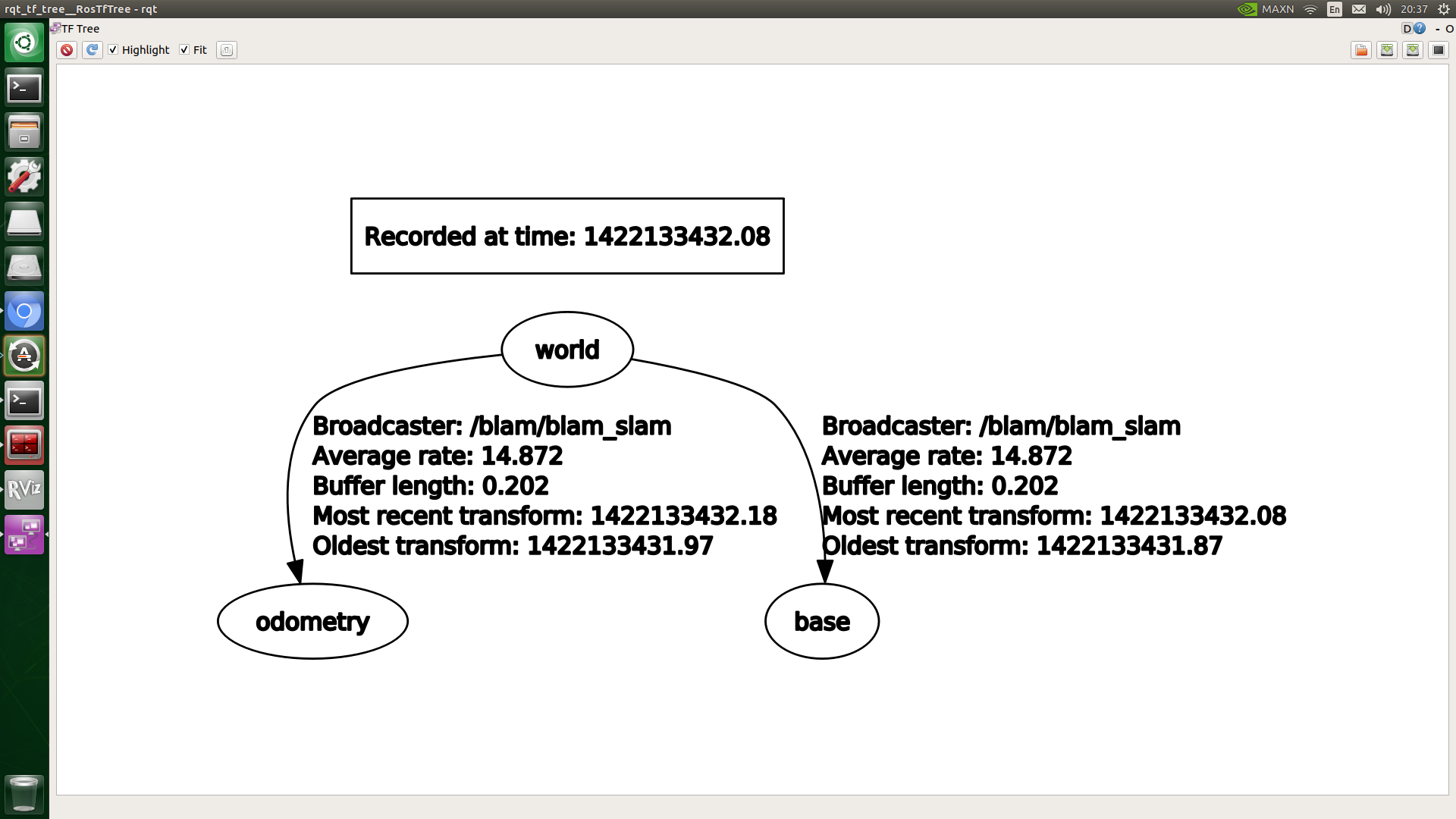
- TF效果如下:
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号