



















autodrive入门教程-测试-游戏杆xbox360测试
autodrive入门教程-测试-游戏杆xbox360测试
说明:
- 介绍如何测试xbox360游戏杆和接收器
安装驱动:
- 参考文章:TX2入门教程硬件篇-外接xbox游戏杆
- 参考文章:xbox360无线游戏杆控制turtlebot
手柄和接收器配对:
- PC接收器连好开发板,并且确保安装好驱动程序
- 手柄打开,按中间大圆按钮,俗称西瓜键,如果没有匹配上,灯会闪烁
- 按手柄前面靠左的小圆按钮,手柄西瓜键灯闪烁旋转,进入匹配状态
- 按接收器的小圆按钮,手柄灯闪烁也进入匹配状态
- 几秒之后自动匹配好,手柄西瓜键灯会亮1/4,接收器也停止闪烁。说明匹配成功。
测试游戏杆
- [Racebot] 启动底盘
$ roslaunch racebot minimal.launch
- [Racebot] 启动游戏杆
$ roslaunch racebot joy.launch
- [Remote PC] 读取数据
$ rostopic echo /vesc/joy
- 按住LB键,使用左摇杆,控制汽车前后移动。按住LB键,使用右摇杆,控制汽车左右移动
- 控制游戏杆遥控,检查读数
更改端口号:
对于默认配对手柄的位置不在1的,可以通过更改端口适配。
确定端口
$ ls /dev/input/js*
/dev/input/js0 /dev/input/js1 /dev/input/js2 /dev/input/js3
- 测试对应的端口
$ jstest /dev/input/js0
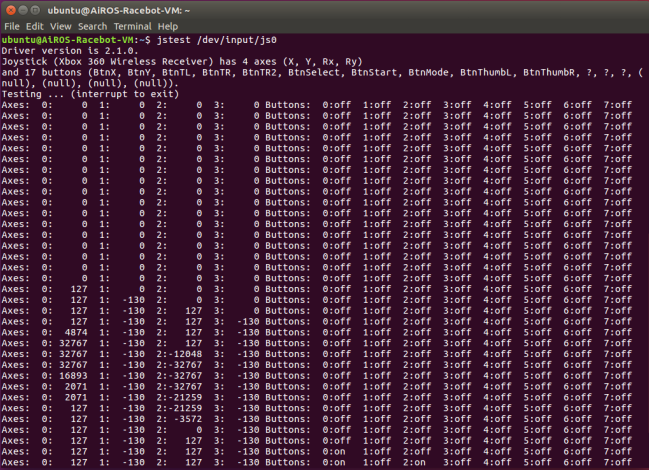
确定第一个是js0还是js1,假设是js0则不用修改,假设是js1则需要修改
- 进入对应目录,修改 joy_teleop.yaml
$ rosed racecar joy_teleop.yaml
- 修改joy_node节点内容如下:
joy_node:
deadzone: 0.01
autorepeat_rate: 20
coalesce_interval: 0.01
dev: /dev/input/js1
- 保存重新运行就可以
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号