



















autoware入门教程-LGSVL1911版-航点导航
autoware入门教程-LGSVL1911版-航点导航
说明:
- 介绍autoware结合LGSVL如何实现航点导航
- 使用BorregasAve的例子
步骤:
- 在Autoware设备下
- 启动autoware
roslaunch runtime_manager runtime_manager.launch
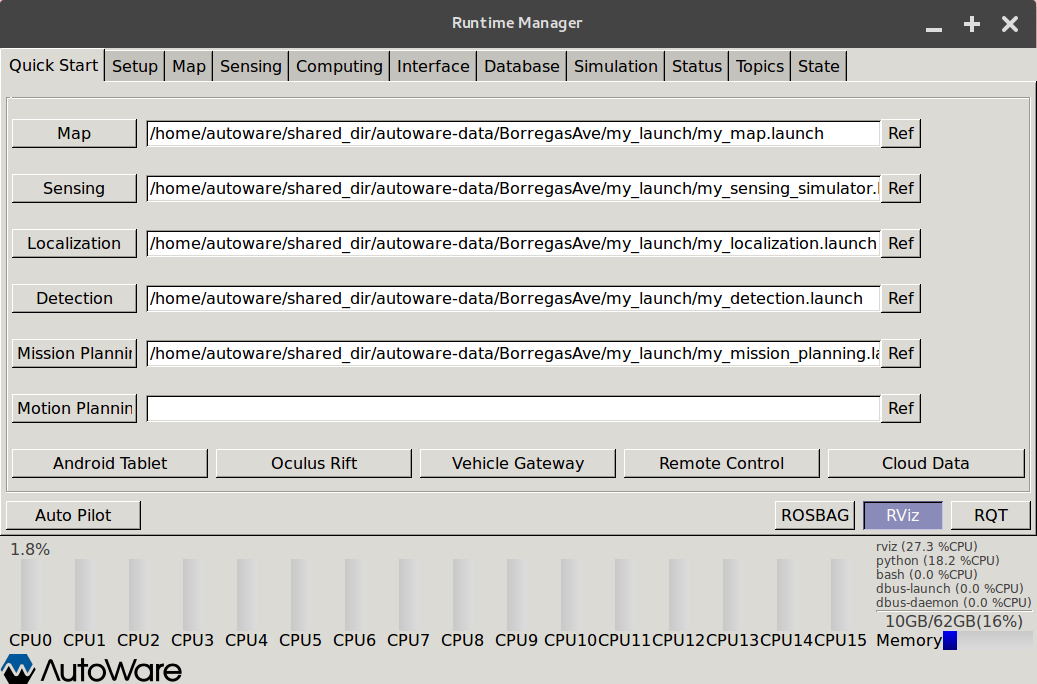
- 切换到Quick Start分页,加载demo文件,参考BorregasAve示例一篇下载的文件
- 分别选择:
my_map.launch
my_sensing_simulator.launch
my_localization.launch
my_detection.launch
my_mission_planning.launch
- 只是点ref选择对应文件,不要启动
- 以上文件,也可以先看看文件内容都启动了什么。
- 效果如下:
开始启动
先点"Map"加载完地图和TF,显示最后有"Ok" 就可以
再点"Sensing"启动rosbridge和转化图像话题
回到LGSVL设备下
启动LG SVL simulator,
选择BorregasAve仿真,启动进入BorregasAve场景
如图:

这个时候autoware设备下,应该能正常获取到雷达和GPS数据了。
回到autoware设备下
切换到Quick Start分页
再点击 "Localization",直到ref后显示时间
接着点击 "Rviz"启动rviz
默认显示定位位置可能是错误的,需要手工选择"2D Pose Estimate"去设置正确的位置
这里默认位置是在地图底部靠右的第一颗和第二颗书之间,有了初始定位之后,才能正确激光数据
这里是考验设备性能的时候了
效果如图:

- 接着切换到Computing分页
- 点击waypoint_loader后的app,选择在上一篇生成的路径点文件
- 勾选waypoint_loader加载路径点,这时候在rviz也可以看到对应的路径点显示
- 再分别勾选lane_rule,lane_stop,lane_select
- 再勾选astar_avoid,velocity_set
- 最后勾选pure_pursuit和twist_filter
- 则小车会沿着路径点自动驾驶。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号