



















autoware入门教程-LGSVL1904版-录制rosbag包
autoware入门教程-LGSVL1904版-录制激光的rosbag包
说明:
- 介绍如何通过LGSVL和autoware实现录制激光的rosbag包
步骤:
win设备按配对步骤,正常进入地图界面,并点击Enable LIDAR
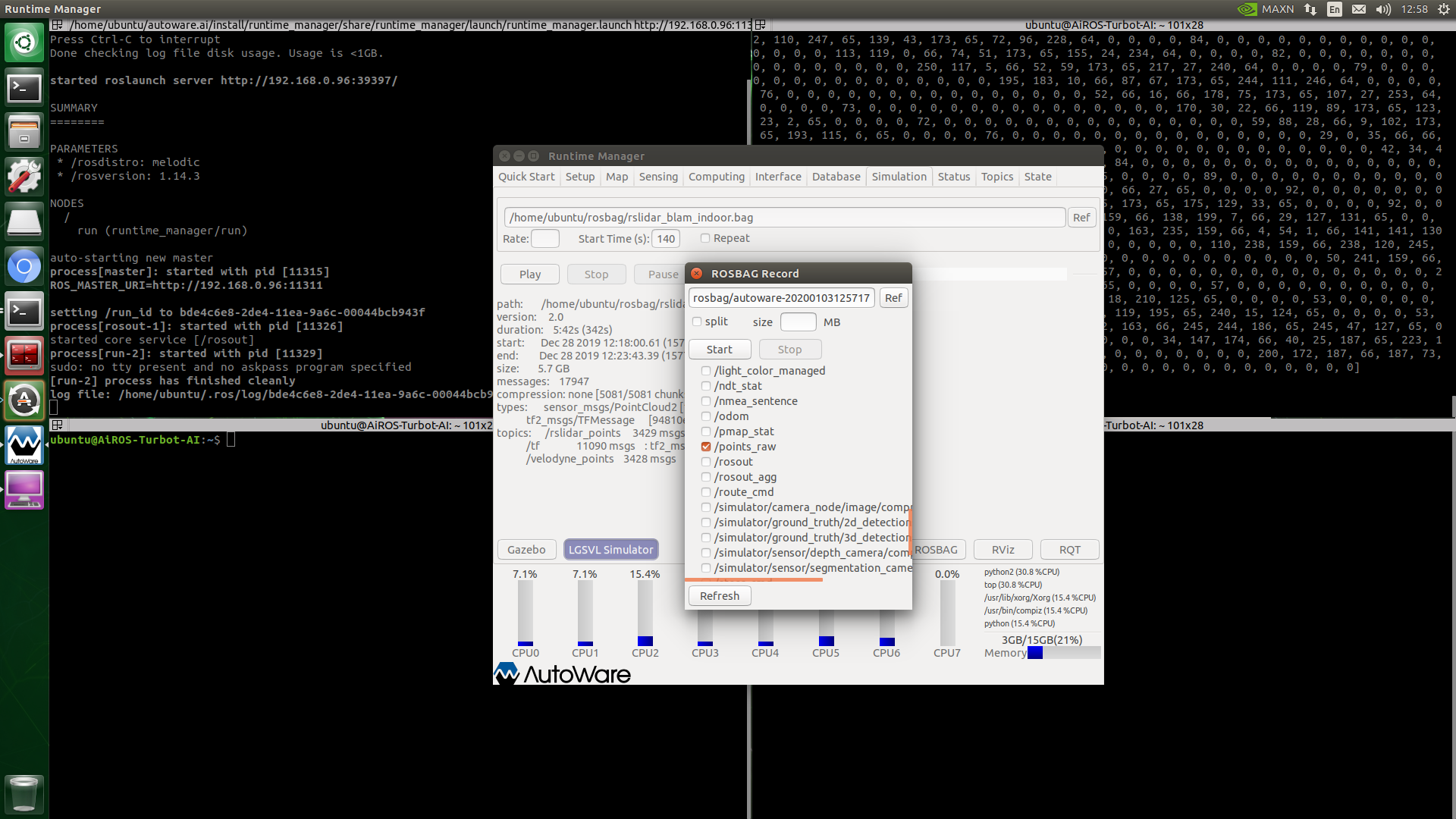
autoware设备切换到Simulation分页下的,点击ROSBAG,再弹出的界面里点击Refresh,刷新话题
选择保存的路径和输入文件名
选择points_raw
点Start开始录制
效果如下:
在lgsvl的地图界面,通过键盘控制,按下方向键前进键,让小车跑起来
或者指定Cruise Control speed在勾选选择Cruise Control 让小车自行缓慢行驶
收集认为足够的激光数据之后,到autoware的rosbag界面下点Stop停止收集数据
完成数据收集。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号