



















ROS与传感器教程-Windows下使用Ublox GPS
ROS与传感器教程-Windows下使用Ublox GPS
说明:
- 介绍如何在Windows下使用Ublox GPS
- 点击采购对应产品
步骤:
下载u-center软件:点击下载
打开软件,在菜单栏选择
Receiver->Connection,选择对应的COM口和Baudrate如图所示,第一个图标是选择串口,第二个图标是选择波特率,第三个是自动传输按钮
先选择串口,图标变绿,表示串口连接成功

如果有数据传输,界面就有变化
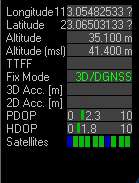
Data View窗口,显示经度Longitude,纬度Latitude,海拔高度Altitude
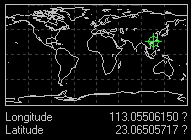
World Position View窗口,显示定位地点
- 在菜单栏选择
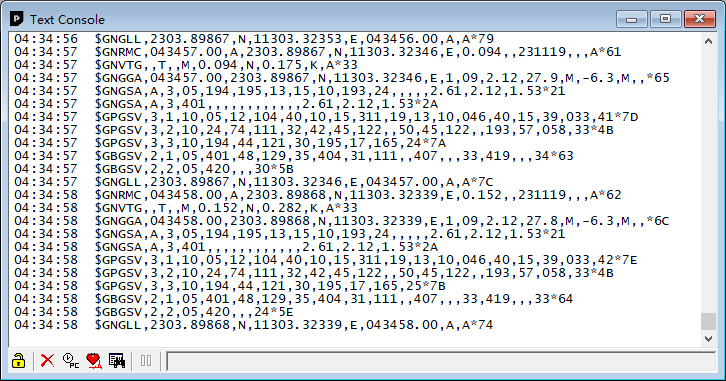
View->Text Control,显示GPS收到的详细信息
修改波特率
在菜单栏选择
View->Messages View,点击UBX->CFG(config)->PRT(Ports)
- 在菜单栏选择
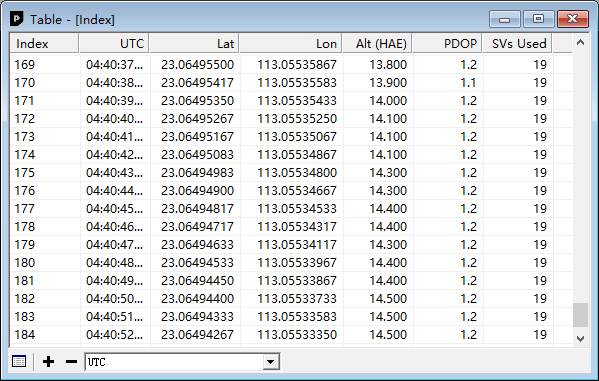
View->Table View,显示GPS收到的各个单独信息
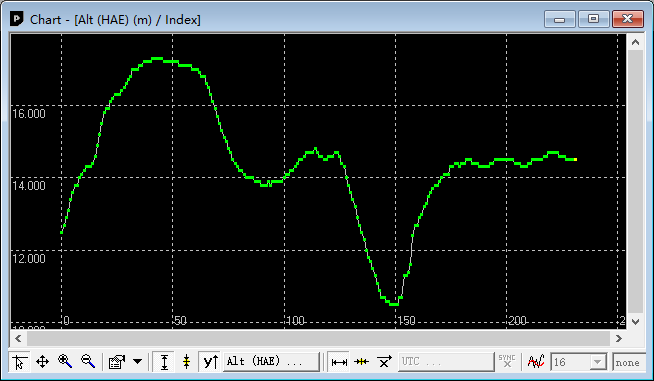
- 在菜单栏选择
View->Chart View,显示GPS收到信息的图表形式
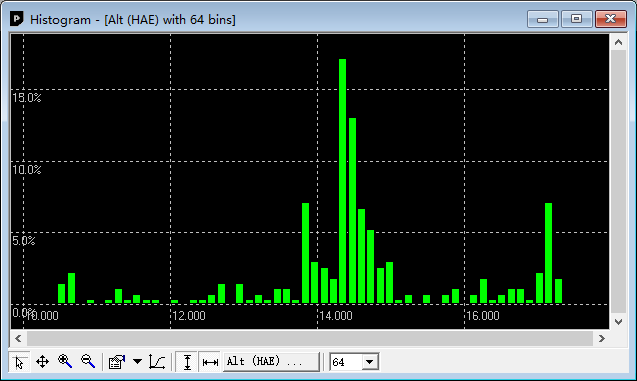
- 在菜单栏选择
View->historgram view,显示GPS收到信息的直方图形式
- 注意:使用百度或谷歌地图直接查询的经纬度,获取的地图定位因为是经过特殊处理,所以是不准确。
- 请使用Google Earth来验证定位。
使用Google Earth验证位置
- 使用网页版Google Earth,点击进入https://earth.google.com/web/
- 点击页面左边的搜索,写入 “latitude纬度 longitude经度” 以你实际的维度和经度为准
- 点击确认回车进行定位
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号