



















autoware入门教程-没有GNSS的定位
autoware入门教程-没有GNSS的定位
说明:
- 介绍autoware如果不使用GNSS进行定位
步骤:
- 启动autoware
$ cd ~/autoware.ai
$ source install/setup.bash
$ roslaunch runtime_manager runtime_manager.launch
- 在管理界面上切换到Simulation分页
- 点击输入框后面的Ref,加载rosbag包
- 具体路径: /home/ubuntu/.autoware/sample_moriyama_150324.bag
- 再点击Play,接着点击Pause
- 效果如图:

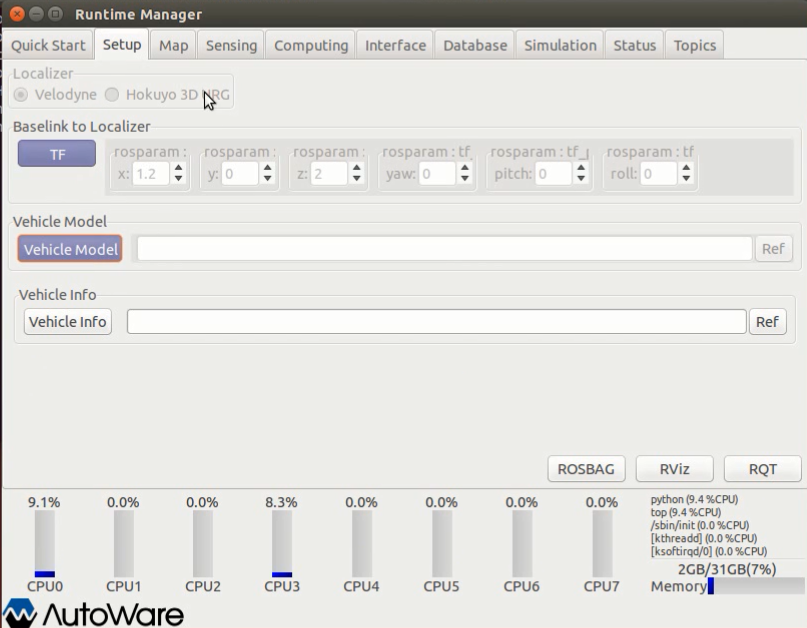
- 选择管理界面切换到setup分页
- 点击TF按钮,再点击Vehicle Model
- 效果如图:
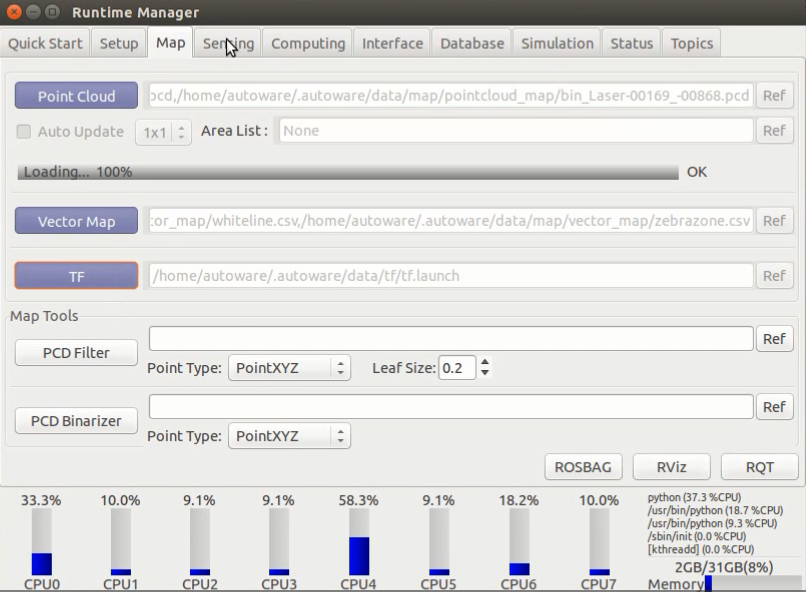
- 再根据上一篇的加载地图数据方法,加载地图数据
- 效果如图:
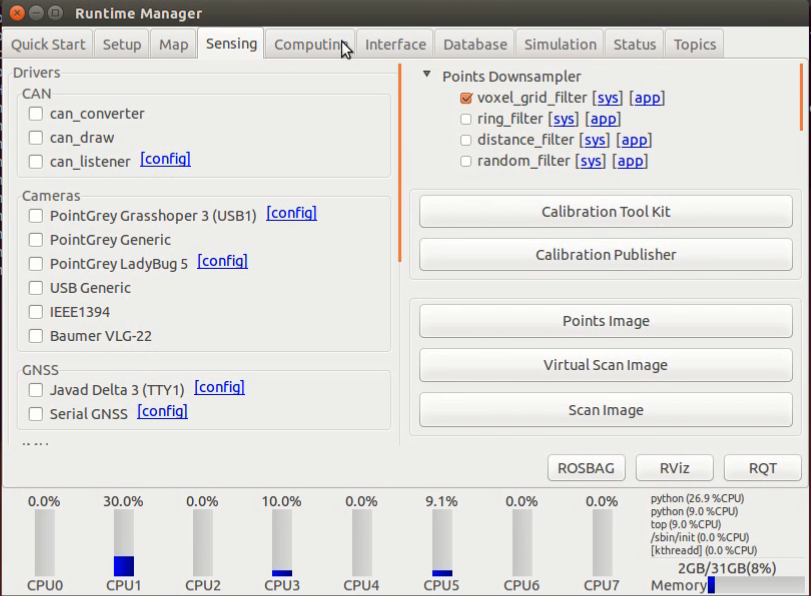
- 再切换到Sensing分页
- 在Point Downsampler, 勾选voxel_grid_filter
- 效果如图:
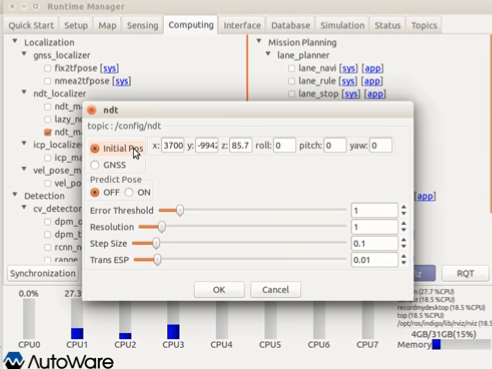
- 再切换到Computing分页
- 勾选nmea2tfpose
- 点击ndt_localizer下的ndt_matching后面的app完成参数设置
- 效果如图:
- 勾选ndt_matching
- 在点击右下角的rviz,选择之前使用的default.rviz
- 最后切换到Simulation ,点击play
- 效果图:


获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号