



















Ailibot入门教程-应用-移动到指定坐标
Ailibot入门教程-应用-移动到指定坐标
说明
- 介绍如何使用Ailibot进行移动到指定坐标应用
相关设备:
- Ailibot套件,采购地址
操作步骤
- [Remote PC] 运行roscore
$ roscore
- [Ailibot] 启动小车
$ roslaunch ailibot_bringup bringup.launch
- [Remote PC] 启动Rviz
$ roslaunch ailibot_rviz view_odometry.launch
- [Remote PC] 执行程序
$ roslaunch ailibot_apps pointopKey.launch
在终端,输入指定坐标的x值,y值以及orientation方向
例如输入:0.5 0.3 45,Ailibot移动到点 (x = 0.5m, y = 0.3m) 和旋转 45 度
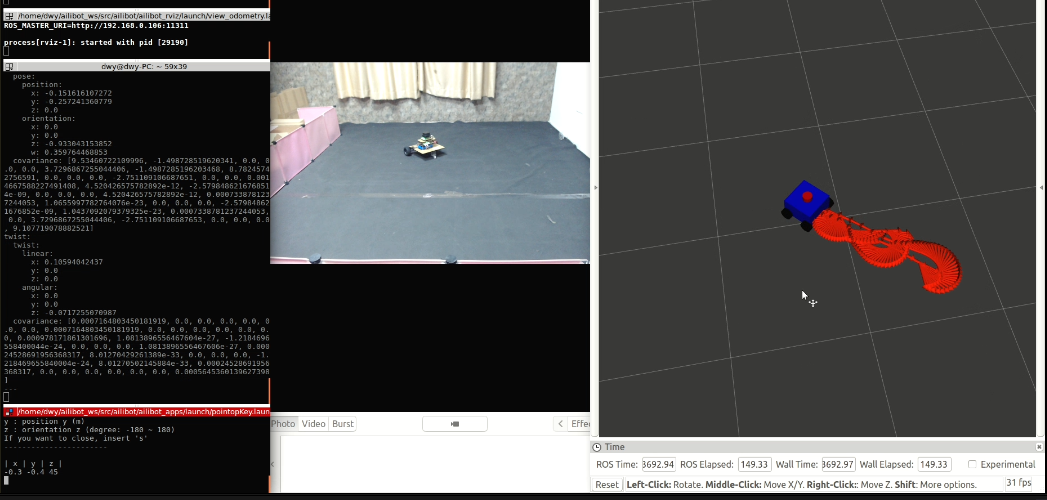
[Remote PC] 监听
/odom里程计话题,查看是否正确到达位置
$ rostopic echo /odom
...
pose:
pose:
position:
x: 0.0
y: 0.0
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
效果如下:
演示视频
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号