



















ROS史话36篇.23 ROS之Gazebo
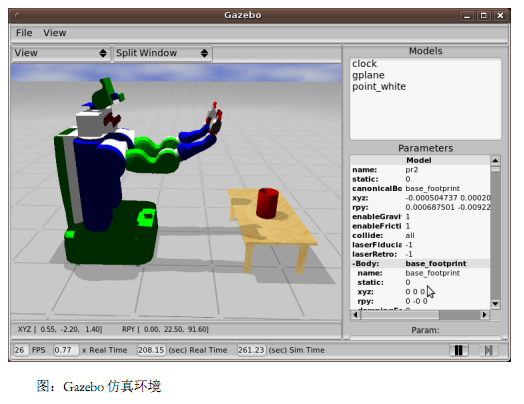
有必要谈一谈 Gazebo。Gazebo 是一个机器人三维仿真环境,这里面增加了称为“基于物理的仿真”这样的元素。学物理的时候,我们学习了,位移,速度,加速度,重力,摩擦力等概念,在这样的仿真环境里,可以模拟这样一些物理概念。
在真实世界中遇到的一些物理现象,在这个仿真环境中尽可能把他们表现出来。它可以与ROS配套,用于完整的机器人仿真,也可以单独使用。
Gazebo 是安德鲁·霍华德(Andrew Howard)和凯特·考尼(Nate Koenig)在南加州大学16,开发的一个开源的机器人仿真环境。
Gazebo从2001年开始开发,到2004年,两位在当年的 IROS 国际机器人会议上发表了一片论文,《一个开源机器人仿真器Gazebo》“Design and Use Paradigms for Gazebo, An Open-Source Multi-Robot Simulator” 17,向学术界介绍了Gazebo的设计结构和使用方法。当时安德鲁·霍华德是南加州大学机器人实验室的教授,凯特·考尼是机器人实验室的一名博士生。
博士毕业后,凯特·考尼,与其他 3 位联合创始人,一起成立了 “开源机器人基金会(OSRF)”。其中,布莱恩·格基(Brian Gerkey)为首席执行官(CEO),负责基金会的全面工作,罗伯特·弗里德曼(Roberta Friedman)为首席财务官(CFO),凯特·考尼为首席技术官(CTO),摩根·奎格利(Morgen Quigley)为首席架构师。
大家可能对安德鲁·霍华德不太了解。如果列出安德鲁·霍华德的经历和参与过的项目,大家一定会大吃一惊了。
安德鲁·霍华德出生于澳大利亚,博士毕业于澳大利亚墨尔本大学。后到美国南加州大学机器人实验室工作,后加入美国航空航天局喷气推进实验室(NASA Jet Propulsion Laboratory),然后被伊隆·马斯克招入Xspace旗下。
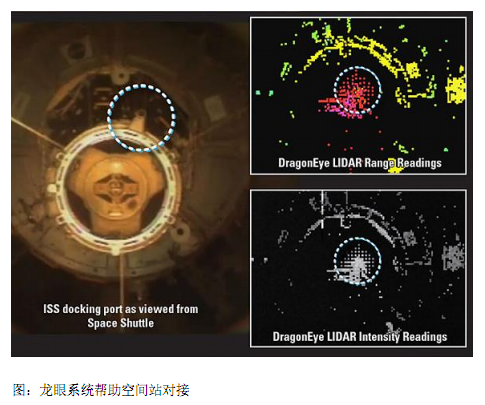
安德鲁·霍华德在美国航空航天局负责“龙眼”系统的开发,“龙眼”利用视觉(激光雷达)技术,引导飞船与国际空间站的对接。后来在 SpaceX 也采用龙眼系统进行空间站对接。
安德鲁·霍华德还在加州理工大学参加无人车挑战赛,参加大狗机器人(Big-Dog)的研发,为大狗机器人提供视觉系统。Big-Dog 就是那只大家在视频里看到的,在冰面上踉踉跄跄,但还保持稳定机器狗。

获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号