



















Kaya-AI机器人教程-软件安装
Kaya-AI机器人教程-软件安装
说明:
- 介绍介绍如何在Jetson Nano设备上进行闪存,安装无线连接以及运行Isaac SDK示例应用程序。
- 要从一开始就使用Nano,请参阅“Jetson Nano Developer Kit入门”。
烧录Nano系统:
连接无线网卡:
- 英特尔8265用于Wi-Fi和蓝牙连接。 使用以下步骤为Jetson Nano安装Wi-Fi/蓝牙无线网卡。
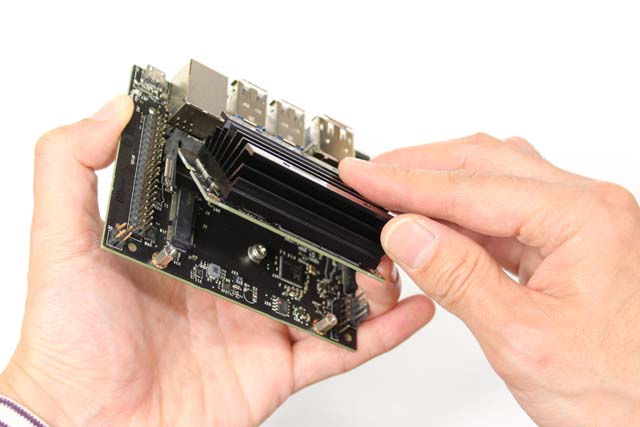
- 要接触载板上的M.2插槽,请卸下侧面的两个螺钉,然后用双手打开SODIMM闩锁。
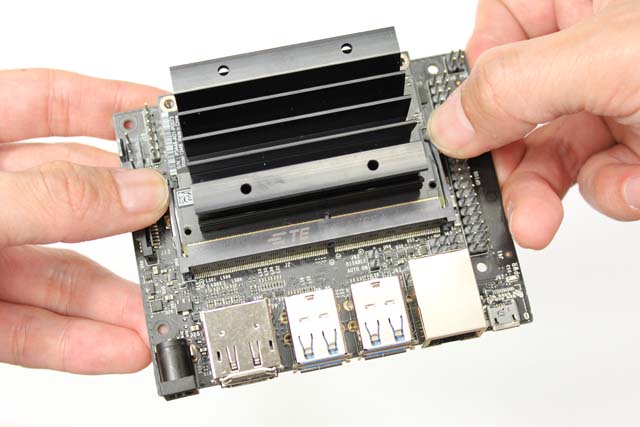
- 当Jetson Nano模块弹出时,轻轻滑出。
取出英特尔无线卡,在将卡插入M.2插槽之前,将天线连接到其U.FL插座上。
将天线安装在插座上需要耐心并习惯。 用指甲轻轻施力。
一旦你处于正确的位置,你就不需要那么大的力量来夹住它。
将Intel 8265卡滑入插槽。

用螺丝将Intel 8265卡固定到位,并更换Jetson Nano模块。 确保在每种情况下使用正确的螺钉。

获取IP地址:
- 通过以下步骤获取Jetson Nano的IP地址:
- 连接键盘,鼠标和显示器
- 在终端提示符下,输入以下命令:
bob@jetson:~/$ ip addr show
安装Isaac SDK:
PC机要求如下:
- 系统为ubuntu 18.04
- 有GPU支持
下载isaac SDK到PC机
cd ~
wget http://file.ncnynl.com/ros/isaac_sdk-2019.1-17919.tar.xz
- 解压到用户根目录下
xz -d isaac_sdk-2019.1-17919.tar.xz
tar -xvf isaac_sdk-2019.1-17919.tar
- 安装依赖到PC上:
bob@desktop:~/isaac$ engine/build/scripts/install_dependencies.sh
脚本安装如下依赖:
- Ubuntu通过aptitude从官方Ubuntu存储库打包,
- Python包通过pip,例如tensorflow和keras,以及
- 构建系统bazel,由Isaac SDK使用。
- 安装依赖到机器人上
bob@desktop:~/isaac$ engine/build/scripts/install_dependencies_jetson.sh -u <jetson_username> -h <jetson_ip>
- 其中<jetson_username>是Jetson上的用户名,<jetson_ip>是Jetson设备的IP地址。
- 该脚本通过aptitude从官方Ubuntu存储库安装Ubuntu软件包。
安装Bazel
- 大型软件项目需要可靠,高效的构建系统,Isaac SDK使用Bazel。
- Bazel为Jetson TX2或Jetson Xavier开发人员套件等各种硬件平台提供了清晰的模块依赖性,密集构建和交叉编译。
- Bazel由依赖脚本安装。 如果需要其他资源,请参阅Bazel主页上的安装说明。
- 请确保您拥有正确版本的bazel,目前为0.19.2。 Isaac SDK可能无法与较旧或较新版本的bazel一起使用。
NVIDIA GPU驱动
- 需要NVIDIA GPU和相应的驱动程序软件才能在PC上运行支持CUDA的代码。
- 机器学习软件也需要它。 建议使用NVIDIA GPU驱动程序版本418或更高版本。
- 使用以下过程安装驱动程序:
bob@desktop:~/isaac$ sudo add-apt-repository ppa:graphics-drivers/ppa
bob@desktop:~/isaac$ sudo apt-get update
bob@desktop:~/isaac$ sudo apt-get install nvidia-driver-418
- 如果需要,将版本418替换为更高版本。
机器学习(可选)
- 构建Isaac SDK时,会自动包含神经网络执行或编写CUDA内核所需的所有依赖项。 不需要预先安装的系统依赖项。
- 但是,要训练神经网络,您必须设置机器学习工具包。
- 例如,要使用TensorFlow进行机器学习,请遵循TensorFlow设置说明
- 该说明还会在系统上安装CUDA,TensorRT和CUDNN。
- 使用以下命令测试TensorFlow是否正确设置:
bob@desktop:~/isaac$ python -c "import tensorflow"
- Isaac SDK支持TensorFlow版本1.13.1。
IMU和电机权限:
- Kaya使用通过I2C协议连接的IMU和通过USB连接的电机。
- 因此,需要在Nano上执行以下命令。
- 请在运行这些命令后启动新终端。
sudo adduser $USER dialout
sudo adduser $USER i2c
- 有关IMU的更多信息,请参阅本文档中的BMI160 IMU连接到Jetson Nano或Xavier部分。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号